
来源:https://zhuanlan.zhihu.com/p/710452402
欢迎引用
柳胜凯,梅涛,徐文君,孟非,焦健,苏杭.柔性机械臂的研究现状和发展趋势[J].机器人技术与应用,2024,No.217(01):7-17
摘要:
柔性臂的研究涉及仿生学、材料力学、机械结构设计与制造、智能感知与控制和人工智能等领域,是一门交叉融合性较高的研究学科。和刚性机械臂相比,柔性臂由软材料或超弹性材料制作而成,具有制造方式简单、人机交互安全、高功率密度比和无限自由度等特点,因此柔性臂在复杂地形探险、医疗手术操作以及对目标的无损伤捕获等方面具有很大的应用潜力。由于柔性臂存在大变形、高度非线性以及刚度较低等问题,所以如何实现对柔性臂的精准数学建模、结构创新制造、有效提升柔性臂的灵巧操作以及输出力是目前需要重点解决的问题。本文从柔性臂的仿生学机理、工艺制作方法、驱动方式、建模方法以及变刚度方式等方面对柔性臂的研究现状进行综述,最后对柔性臂的关键研究技术进行归纳、对未来的发展趋势进行了预测。
关键词:柔性机械臂,仿生机理,工艺制作,驱动方式,柔性臂建模,变刚度方式
引言
20世纪60年代国外研究者开始对柔性臂开展研究,当时对柔性臂的研究主要是以气动人工肌肉的形式出现,后由WINTERS 等人对该人工肌肉进行结构重组,并利用生物力学的方法构建较为逼真的仿生骨骼模型。
柔性臂由软材料或超弹性材料制作而成,因此具备较高的柔顺性、灵巧的运动特性以及较为安全的人机交互。正是由于这种特性,使得柔性臂相较于刚性机械臂在面对复杂环境时具有超高的适应能力,特别是在面向医疗手术、海洋油气勘探、水下目标抓捕等重大应用等领域极具潜力。国外以费斯托公司、哈佛大学海洋机器人实验室、马萨诸塞州波士顿学院、麻省理工学院、斯坦福大学、意大利仿生研究院和圣安娜高等学院为代表,国内以北京航空航天大学、中国科学技术大学、浙江大学、上海交通大学、南方科技大学等高校为代表的机构分别对柔性臂的快速发展起到了非常大的推进作用。
柔性机械臂的研究涉及多个领域技术的交叉融合,它融合了仿生学、材料力学、机械结构设计与制造、智能感知与控制以及人工智能等领域。本文从仿生学机理、柔性臂工艺制作方法、驱动方式、建模方法以及变刚度研究等方面对柔性臂近些年的研究现状进行综述,并对柔性臂现阶段急需要解决的问题、未来的发展趋势以及可能的主要应用领域分别进行阐述。
1.仿生学机理
师法自然,自古以来大自然就是人类发明的源泉。生物在不断进化的过程中,为了获得生存和发展,逐渐具备了能够适应自然界变化的本领。自然界中的象鼻、蛇、章鱼触手以及变色龙的舌头(见图1)等相关生物的软体结构、运动形式和捕食方法分别为柔性臂的设计提供了很好的仿生灵感。此外,仿生学的意义并不局限于对形态的模仿,它的核心价值是理解自然界中生物运作的模式及其背后的逻辑,并巧妙地利用这些机理来解决实际问题。

章鱼是一种捕猎能力很强的海洋软体生物,腕足灵活性高,捕猎时通常使用柔软的腕足对目标进行缠绕抓取,此外,腕足还能够根据猎物尺寸进行适应性变形,约束猎物的运动。生物学家通过对章鱼触手结构进行研究发现,这一类软体结构可以快速地伸长并具备向任意方向弯曲的能力,还可以同时针对不同的工作目标灵活改变自身的刚度,他们将这一类结构称之为“肌肉静水骨骼”。由于此类结构大多数没有刚性骨骼,而是由表皮、肌肉、体液和神经系统组成,在变形过程中会像水一样不可压缩,也就是形态变化前后体积保持不变,该肌肉特性使得这种肌肉结构产生拮抗作用,进而实现刚度的变化,这就解释了章鱼触手既可以实现对小目标物体的柔性抓取,也可以实现对大目标物体的捕捉。
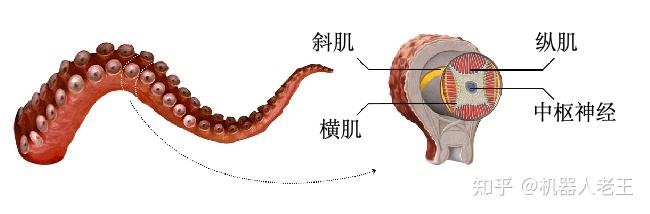
KIER等人通过解剖章鱼触手的肌肉结构,发现其肌肉组织主要由三部分组成,分别是横向肌肉、纵向肌肉以及斜向肌肉,章鱼触手截面结构示意图的中间部分为神经控制系统,如图2所示。研究者们通过对章鱼臂的多次观察测量,发现章鱼臂在径向平均收缩23%的情况下,轴向平均伸长70%,即较小的收缩就会形成较大的伸长。相反,章鱼臂的缩短也是源于纵向肌肉的收缩。章鱼通过控制一侧的纵肌收缩就会让章鱼臂弯曲,斜向肌肉主要用于实现软体臂的扭转,在纵肌和斜肌的共同作用下,章鱼的触手就会产生缠绕的形态。
2.材料及制作方法
柔性臂的进步很大程度上取决于机械臂结构设计中的材料特性以及利用这些特性实现对柔性臂的控制。柔性臂的制作方法主要分为基于模具铸造成型的技术、失蜡铸造等、3D打印技术等。
采用传统铸造成型的方法能够设计出不同类型的柔性臂。这种方法在对软体臂的研究中较为常用。铸造成型的方法主要以硅胶材料作为柔性臂的本体,常见的硅胶材料型号有Ecoflex-0030、Ecoflex-0050、Dragon Skin 20、Dragon Skin30等。只需要通过将硅胶按照质量1:1的比例进行配置好后倒入预先准备好的模具中,然后经过2-4个小时的固化后得到柔性臂的本体。
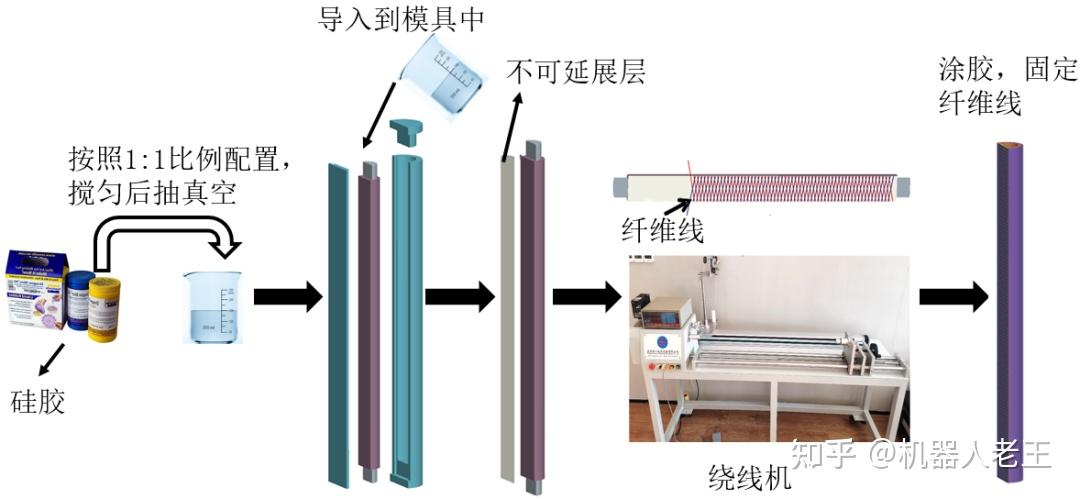
下面简要介绍基于加强纤维束缚的柔性臂制造过程。如图3所示,操作步骤如下:
(1)按照对应比例调制硅胶,搅匀后抽真空,防止内部出现气泡;
(2)将抽完真空的硅胶注入到打印好的模具中;
(3)粘贴不可延展层;
(4)利用绕线机按设定角度对柔性臂表面缠绕纤维线;
(5)涂硅胶,固定住外围的线;等固化成型后,柔性臂的制作即完成。
失蜡制造是较为常用的一种制造柔性臂的技术,包括压蜡、修蜡、注塑、沾浆、熔蜡、浇铸及后处理等工序。该技术主要缓解了铸模制造技术中脱模比较困难的问题。把蜡模按照设定好的形状先定型,然后将配比好的硅胶浇筑到模具中,等硅胶固化成型后,只需要将该模具放入到沸水中即可熔化蜡模。
3D打印技术因其可以同时打印多种材料而成为制造软体机器人的关键技术。特别是,3D打印技术的提升也将柔性臂的制作带入到一个新的阶段。利用3D打印技术可以直接打印出成型的柔性臂。和铸造成型方法相比,无需后续加工,省去了中间很多的繁琐步骤,并且成型后的精度也有大幅度的提升。WEHNER等人提出了一种受章鱼启发的柔性自主机器人集成设计策略,使用了混合制造技术,包括模压、软光刻等,并且通过多材料嵌入式3D打印技术在本体内绘制运动所需的气动执行器网络结构。MARTINEZ等人使用3D打印技术设计和制造了一种柔性触手,这种柔性触手基于空间分布在两种不同弹性体界面上的微型气动网络,具有复杂的三维运动能力。这项工作成功地展示了这些触手的运动范围和抓取任意形状不同物体的能力。
3.柔性臂驱动类型
柔性臂的驱动方式主要可以分为流体驱动、绳索驱动和智能材料驱动。
3.1 流体驱动的软体臂
流体驱动主要以气压驱动和液压驱动为主,基于气压驱动的优势是响应速度快、制造成本低廉、重量轻、高功率密度比。相较于气压驱动,基于液压驱动的柔性臂,其刚度会大幅提升,更适合于在水环境下或无重力条件下进行作业。基于流体驱动的柔性臂大都是在本体外部包裹一层束缚层纤维或其他的可以约束本体膨胀的材料。这样做的目的是可以增大软体臂的耐压范围、最大限度地增加软体臂的形变,进而增加柔性臂适用范围。
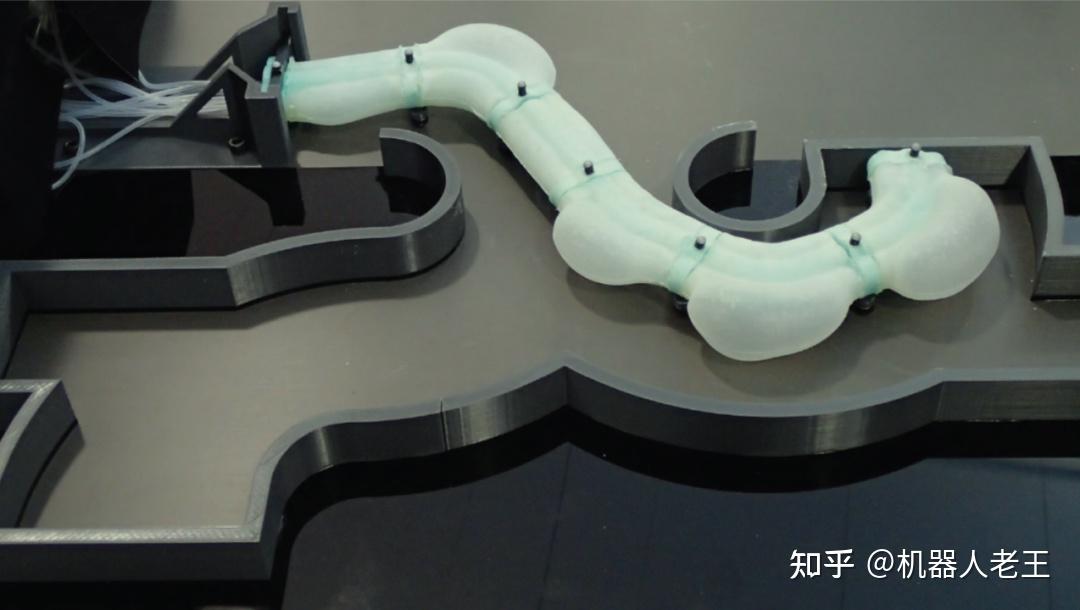
麻省理工学院计算机科学和人工智能实验室的研究人员研制了一个多腔道、可以在平面弯曲的软体臂,利用视觉系统实现了曲率及位置闭环控制,可以让软体臂在复杂环境中自由穿梭,如图4所示。
美国伊利诺伊大学的KRISHNAN等人对加强纤维的气动软体臂运动学变化进行了详细介绍,着重分析了不同纤维缠绕角度下对软体臂形状变化的影响。该研究利用几何分析的方式阐述了当纤维角度对称缠绕且等于54.73°时,软体臂的形态会发生自锁,当对称纤维角度大于54.73°时,软体臂轴向将会伸长、径向收缩;反之,轴向收缩、径向伸长。北京航空航天大学文力教授团队提出了一种具有三维运动的柔性臂的设计方法,采用模块化的设计方法,每个模块都具有三个单独的腔室,这些腔室可以让该模块具备三个自由度。柔性臂的表面设计成波纹状,并将橡皮筋覆盖在波纹状的沟槽内用于约束柔性臂的膨胀。
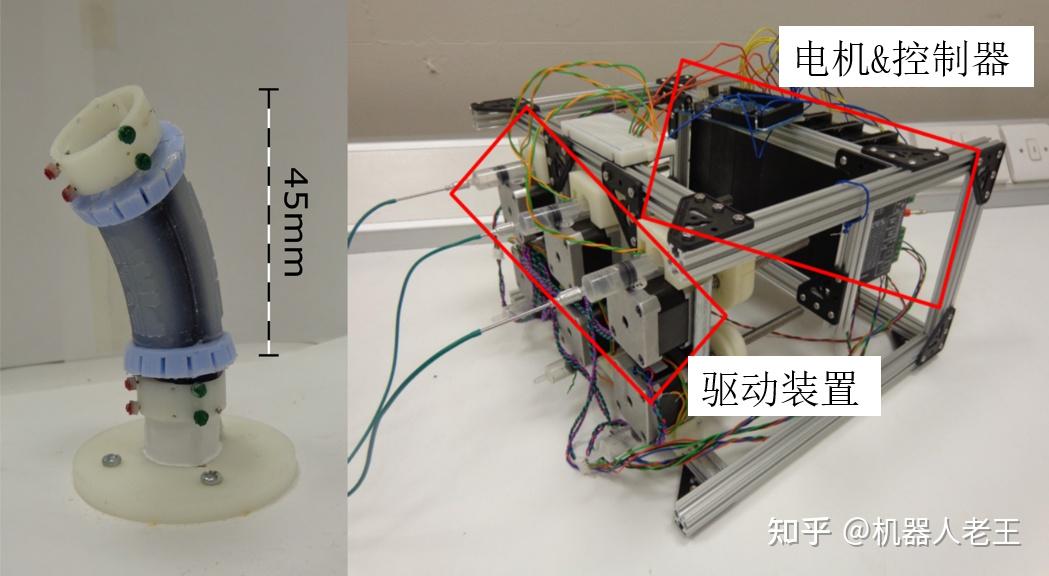
伦敦国王学院的LINDENROTH等人制作一个液压驱动的柔性臂,如图5所示,左图为腔道软体臂,右图为液压驱动装置,该柔性臂采用三腔道设计方式,可以实现360°的旋转以及实现多方位的弯曲。
哈尔滨工业大学的研究人员考虑到柔性臂在实际应用中可能会存在一些突发的损坏问题进而影响柔性臂工作效率。为提高软体臂的工作效率,研究人员将柔性臂进行模块化设计,分别设计出弯曲及扭转模块。其中,弯曲模块采用对称三腔式设计方案,能够全向弯曲;扭转模块采用螺旋腔体设计,采用不可伸长柔性材料限制模块轴向运动,最大可实现120°的旋转。哈佛大学CONNOLLY等人研究了缠绕角度和密度对软体臂变形的影响,给出了指定运动学轨迹设计策略。斯坦福大学的BLUMENSCHEIN等人通过观察植物藤蔓的生长方式制作出了一种通过设定束缚层路径实现柔性驱动器的多运动形式,如图6所示。在给定常曲率假设的前提下,建立了螺旋驱动的静力学模型。基于藤蔓状生长的柔性臂为从紧凑的环境中创建可部署的结构提供了可能性,并允许柔性臂在混乱或难以导航的环境中缠绕和抓取物体。

费斯托公司从象鼻和章鱼触手获得灵感,设计了一个仿生柔性臂,该柔性臂有12个自由度,有效载荷可以达到3kg,可以携带与自身重量相近的物体。此外该柔性臂由三个灵活的单元组成,每个部分由四个气动波纹管构成。对12个柔性波纹管结构的复杂控制由费斯托研发的控制终端完成。这种模块化结构允许机器人手臂往不同的方向弯曲。

耶鲁大学的 KIM等人提出了一种自粘复合薄片,灵感来自于肌肉液压调节器的结构形态,它可以附着在任何体积膨胀的软体臂上,根据贴附形式的不同可以控制柔性臂的运动轨迹,如图8所示。

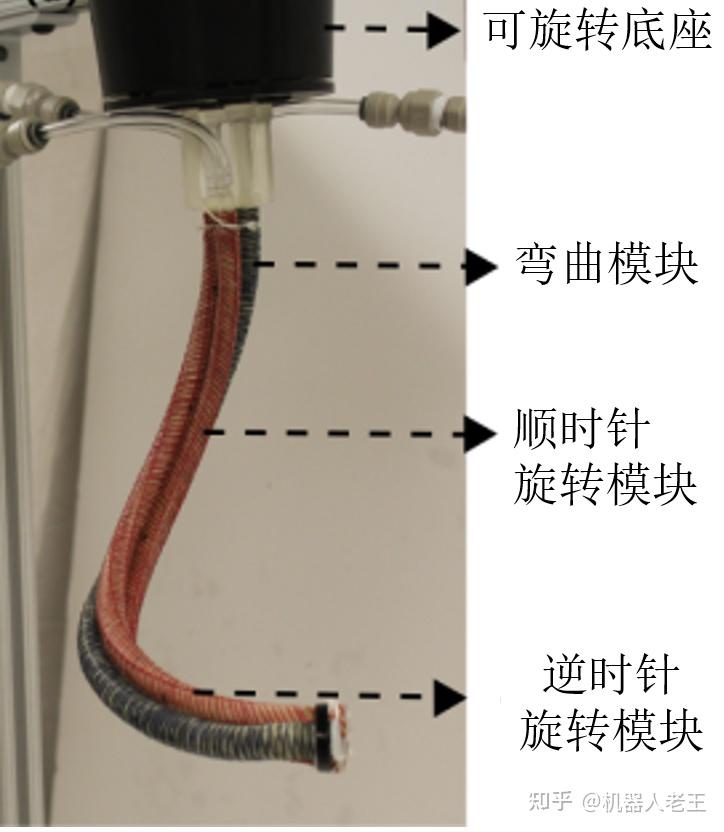
为了增加柔性臂的工作空间和灵活度,UPPALAPATI等人提出了一种并联气驱柔性臂BR2,该机构由两个扭转模块和一个弯曲模块组成,其中两个扭转模块的扭转方向是相反的,即一个顺时针旋转,一个逆时针旋转。通过控制扭转和弯曲模块的输入气压,柔性臂可以实现较大的运动空间,如图9所示。
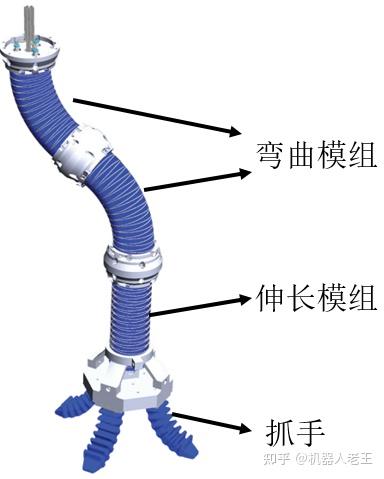
北京航空航天大学文力教授团队研究了在浅水区域(水深10m)有效的灵巧抓握的软体机械手,该结构由两个弯曲模组、一个伸长模组以及末端的一个软体手爪组成,如图10所示。通过四个模组之间的相互配合,以及在外部视觉反馈的作用下可以实现对浅水中的目标有效抓取。
基于流体驱动的柔性臂响应速度快,质量轻、对环境的适应能力强,但是也存在输出力较小,在外力作用下容易改变自身的形变,由于是气压或水压驱动,就必须携带气泵或液压泵,导致整体的系统较为庞大等缺点。
3.2 绳索驱动的柔性臂
绳索驱动就是在柔性臂的轴线方向固定一组或多组可拉伸的线,常见的绳索驱动一般都配置三到四组驱动线就可以控制柔性臂实现弯曲运动或扭转运动。要想实现更为复杂的运动,就需要多组绳驱模块进行串联组合。基于绳索驱动的柔性臂输出力量比较大,抗负载能力也强,控制也较为简单,只需要控制绳索的拉伸长度就能实现对软体臂的姿态控制。
CALIST等人利用硅胶来简单模拟章鱼肌肉的特性,该仿生章鱼臂排布了40根线缆,包括4根纯纵向的线缆和36根混合横纵的线缆,如图11所示。通过控制绳子的拉力可以使得径向尺度最大收缩20%,轴向最大伸长60%。

ZHENG等人受蛇的骨骼和章鱼臂的肌肉排列方式得到启发,提出了一种仿生绳索驱动柔性臂,该柔性臂有三个部分组成,每个部分有几个相同的椎骨组成。这些椎骨通过球形关节和灵活的脊椎骨进行连接,并且通过导线的驱动可以实现在X、Y方向的弯曲运动。这种柔性臂的特点是结构设计更加紧凑,同时具有更高的定位精度。
受象鼻子的启发,YESHMUKHAMETOV等人设计了一种带柔性万向节的线驱动柔性臂,这种设计结构由9个分段组成,如图12所示,每个分段都有两个旋转关节,分段之间的连接还加入了弹簧,通过控制绳索的拉力,可以改变骨架硬度和弯曲程度。

大多数的研究者在对柔性臂设计的过程中,大都是以细长型(即长径比大于10倍)柔性臂为基础,因为这样的设计方法更易于在对柔性臂建立一些数学模型。CHAIROPOULOS等人设计了一种非细长的绳驱柔性臂,如图13所示,该方案通过控制激活三根中的一根绳索实现柔性臂的弯曲变形,并采用单节段的肌腱驱动实验对该文提出的大应变模型进行了验证。
基于绳索驱动的柔性臂输出力大,运动行为更加灵活,响应速度较快。但是想要达到较高的自由度就必须装载更多的电机,这样也势必会造成整体的系统比较笨重,同时对系统的控制性能的要求也比较高。
3.3 智能材料驱动的软体臂
CIANCHETTI等人开发了一个新的柔性臂部件,利用介电体活性聚合物(在电的驱动下,可以发生伸缩反应)充当章鱼臂的横向和纵向肌肉,这种材料在电的驱动下,可以发生伸缩反应。实际测试了壁厚为150μm的柔性臂,在施加2000V电压激励的条件下,收缩率可以达到20%的效果。LASCHI 等人利用形状记忆合金和绳索驱动来模拟章鱼臂的运动特性,如图14所示。形状记忆合金的加入可以增加软体臂的横向收缩能力,在绳索和形状记忆合金的共同驱动下可以大幅提高软体臂的刚度,同时也验证了该软体臂可以在水下像章鱼触手一样完成伸长、收缩以及弯曲等动作。
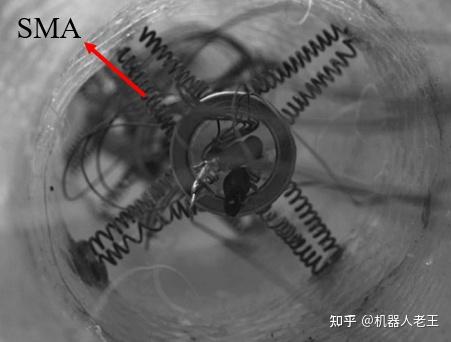
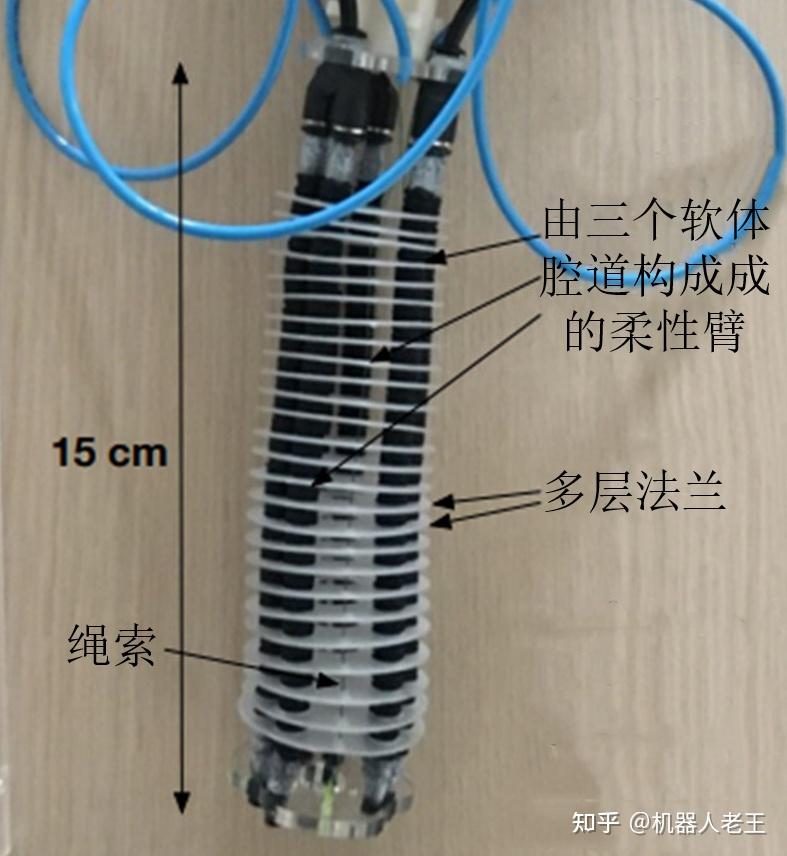
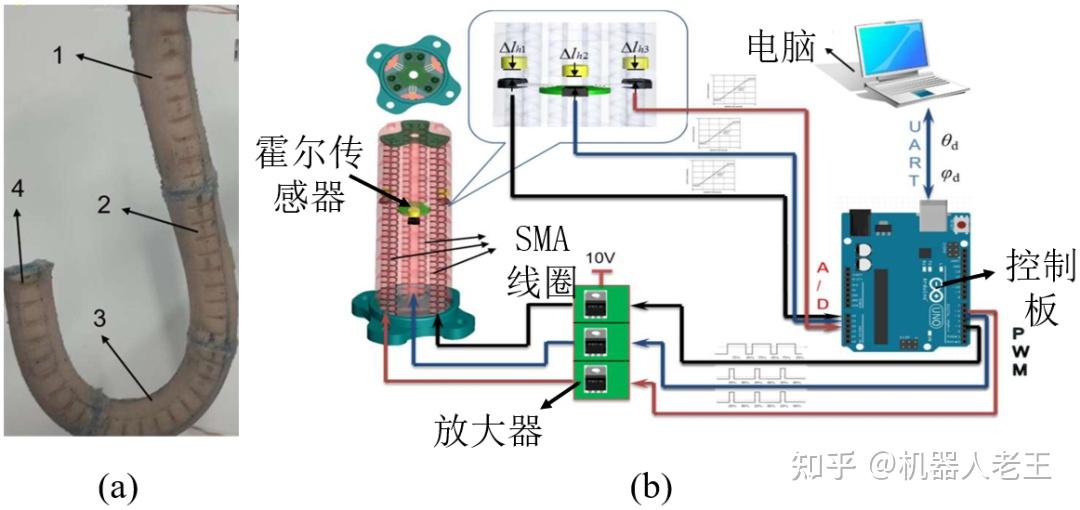
中国科学技术大学张世武教授带领团队研究出基于形状记忆合金(SMA)的驱动的仿章鱼柔性臂,如图15(a)所示,该柔性臂的每个节段的腔室内部都镶嵌了霍尔传感器,如图15(b)所示,霍尔传感器被用来测定柔性臂的弯曲程度,通过霍尔传感器的曲率反馈,可以很方便实现对柔性臂姿态的精准控制。
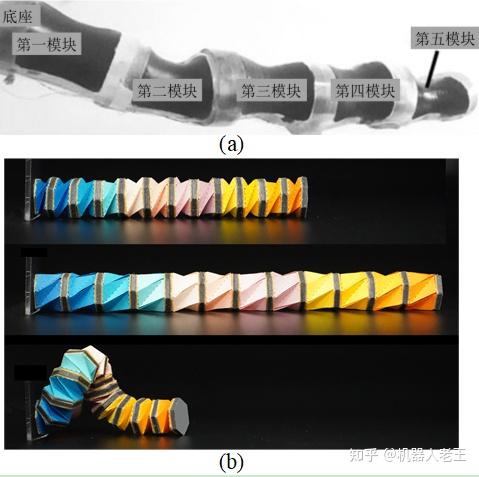
哈尔滨工业大学、苏州大学和加州大学伯克利分校合作研究出一款利用介电弹性体驱动的柔性臂,该柔性臂的长度为32cm,重量仅为18g,由五个模组串联组合而成。为实现整体连续变形,各模块支架由多路的高压电源(1-5kV)独立控制,并通过实验验证了该柔性臂可以实现较大的连续变形,如图16(a)所示。2021年,斯坦福大学的WU等人开发了一种应用折纸机构的柔性臂,该柔性臂可以不受驱动器尺寸以及管线的束缚,因为其驱动方式利用磁场的变化实现不同的运动。他们将嵌入磁性颗粒的磁片和 Kresling折纸机构连接在一起构成单个 Kresling 机构单元,然后再将这些结构单元进行整合,最后在磁场的控制下可以分时实现收缩、伸展以及全向弯曲等动作,如图16(b)所示。
智能材料的引入为轻型柔性臂的发展起到了很好的促进作用。基于智能材料驱动的优势是可控性或可编程性较好,体积小、重量轻;缺点是可能需要外加较高的电压才能进行驱动、输出力较小、反应速度较慢。
4.建模分析方法研究
柔性臂是由一种高维非线性和超弹性材料制作成的,这些材料特性会导致研究人员难以对柔性臂进行精准有效的控制,现阶段的研究大都是假设在一定条件下,用所提出的数学模型尽可能去逼近柔性臂的形态。目前对柔性臂建模方法的研究主要可以分为三大类:几何建模、静力学建模、动力学建模。
4.1 几何建模
对柔性臂进行几何建模的分析方法是不需要考虑外力或自身重力因素。其中,常曲率模型是最常用的几何建模方法。常曲率模型将软体手臂伪近似为一系列常曲率相切的弧,虽然大多数连续体机器人的形态并非完全圆的,但是有许多形态曲率是近似的完美圆弧。DELLA 等人分析了一种改进的分段常曲率三维软体臂状态空间参数化方法,重点考虑了参数化的控制应用。JONES等人基于分段常曲率前提对连续体机器人进行建模,通过机器人形状坐标,将工作空间坐标(笛卡尔坐标系)和驱动器输入(气压或者绳索长度)联系起来,从而实现实时任务和形状控制,这种新颖的方法着重考虑了柔性臂的约束问题,避免了与以前方法相关的简化假设现象,如图17所示。
哈佛大学的POLYGERINOS等人利用基于加强纤维的方法制作了一个弯曲的柔性臂。基于软体臂与物体接触产生力的准静态分析和有限元模型,提出一个几何力学分析模型。利用该模型可以实时的将压力信息转化为弯曲角度信息。浙江工业大学鲍官军教授团队提出一种简洁的柔性机器人弯曲和皱折模型的数值分析方法,对以章鱼为原型的软体机器人的弯曲和皱折模型进行了分析。根据柔性机器人的弯曲几何和简化模型,建立了柔性臂的数学模型,得到了弹簧长度模型与机器人弯曲参数(弯曲方向、弯曲角度、弯曲半径)之间的映射关系。同时,该文章在皱折模型的基础上还分析了柔性臂在外力作用下失效的主要原因。SINGH等人提出了组合最大化体积法和虚功原理来预测平面中软体臂的形状,并提出两步法对柔性臂设计。设计的第一步是曲线被划分为一系列常曲率段;第二步通过确定每个分段的方向来设计驱动器,接着将两步法推广到两条曲线的匹配,进而设计出期望的软体臂的形状,如图18所示。

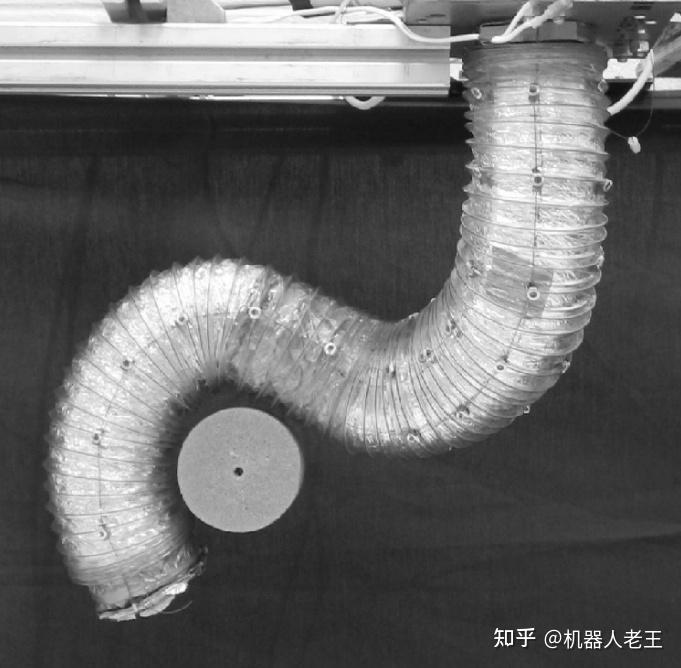
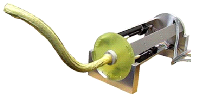
哈尔滨工业大学冷劲松教授研究团队指出气动人工肌肉运动在一定程度上仅局限于单轴收缩和拉伸,这也限制了其发展,为此该团队从大象的鼻子得到启发,研制出一个新型的弯曲螺旋可伸缩的柔性臂,如图19所示,该柔性臂的束缚层所用的编织管是通过厂家特殊定制而成,可以实现伸缩的运动,根据这种设计结构,该团队通过实验分析,建立了气动人工肌肉的广义弯曲行为模型,并在相同的理论框架下研究了轴向、弯曲和螺旋气动人工肌肉的特性。

鹏城国家实验室(PCNL)梅涛教授团队在常曲率建模的基础上,提出了一个端到端的计算框架来共同优化多截面加强纤维柔性臂的形态和驱动空间参数,以匹配特定的轨迹,并利用协同优化的方案可以使得单个柔性臂产生一组轨迹序列。如图20所示,柔性臂的设计参数被优化之后得到“PCNL”的字符形状。

GONG 等人提出了一种简单有效的柔性臂末端空间位置和轨迹的运动学方法,该方法基于反向等曲率的假设,可以快速地求解连续软体机械臂的逆运动学模型。为了提高控制精度,该研究中利用双目相机和手持相机对软体臂进行了实时闭环拾取和放置实验。北京理工大学LIU等人受章鱼臂的启发,分析认为,半圆截面的软体臂比圆形截面有更好的弯曲性能;研究了在水环境下,半圆截面的柔性臂的建模分析方法;利用所建立的模型分析了影响软体臂螺旋半径的因素,包括纤维角度、软体臂内半径、壁厚等参数,并且所建立的数学模型误差在15%以内。
基于几何建模的方法优点是求解速度快,实现方法简单,适用于对实时性控制要求比较高的系统;缺点是没有考虑自身重力或外力对其形态的影响,若想达到比较精准的控制,必须加装一些传感器作为反馈。
4.2 静力学建模
OLIVER-BUTLER等人提出在外部载荷下,对内嵌绳索驱动方式利用欧拉-伯努利梁理论进行解析求解,描述了绳索位置和路径对机器人任意点输出刚度的影响。GRAZIOSO等人推导了外加负载作用下的软体臂的静力学解析解,提出的模型建立在Cosserat rod理论基础上,基于力学的视角用于描述柔性臂的运动学和静力学行为,该方案将轴向、剪切、扭转和弯曲效应造成的大变形纳入到模型中,并对对柔性臂的形状姿态进行了解析积分。
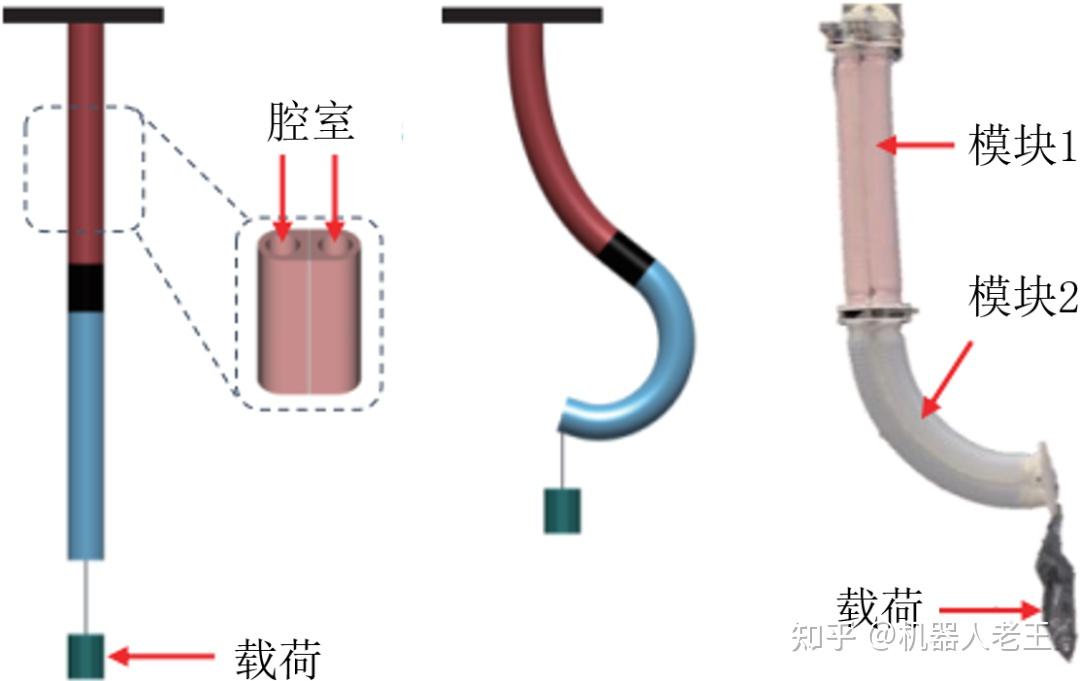
UPPALAPATI 等人研究了螺旋缠绕抓取的纤维增强驱动器的设计和建模,利用纯螺旋模型和Cosserat rods理论模型分析了自身重力对柔性臂形态的影响,通过实验验证了所提出的模型能够准确预测变形。上海交通大学谷国营教授所带领的团队提出了一种考虑外力作用变曲率运动建模方法,实现了对柔性臂精确运动仿真和前馈控制,该团队利用绝对节点坐标系法对变曲率构型进行参数化,然后建立了一种运动学模型,来描述定义的构型空间与带有载荷的驱动空间之间的映射关系,如图21所示。
北京理工大学联合鹏城实验室软体机器人团队一起合作提出了一种新的柔性臂静力学建模方法,该方法通过将最大化体积法、虚功原理以及欧拉伯努利梁理论进行结合的方式来构建柔性臂的形状解算模型,利用该数学模型可以分析外力施加在软体臂中间位置或末端位置的形变过程,并通过多组实验验证了所提出模型的有效性。
基于静力学建模的方法由于考虑了自身重力或外力对其形态的影响,故精度要比几何建模高,适用于对静态的目标开展作业。但是静力学模型只能解算柔性臂最终时刻的形态,对于其过程中的形态变化无法解算,特别是对于高速运行的目标物体该模型有可能要失效。
4.3 动力学建模
KANG 等人提出了一个基于活体章鱼的多连续臂机器人的动态模型,分析了单臂的运动学和动力学,包括纵向肌肉、径向肌肉等体积约束;将单臂模型扩展为多臂系统,能够生成原型运动模式,如爬行和游泳。该研究采用基于章鱼神经生理学的分级控制器实现了对多连续臂系统的简单可靠控制。
RENDA等人提出了一种基于离散Cosserat rod方法的多截面柔性臂动力学替代模型,该模型不仅考虑了剪切和扭转变形,而且继承了连续Cosserat模型的几何和力学特性,对于柔性臂的形状预测更加精准。
ZHENG等人以章鱼为原型,建立了水下连续介质机器人的运动学和动力学模型,将质量、阻尼、刚度和重力、浮力、水动力等外力因素都考虑在了动态模型中,并验证了仿真模型结果与实验结果可以较好的吻合。上海交通大学王贺升教授团队提出了一种绳驱的水下动力学建模方法的研究,利用凯恩理论将复杂的流体力学引入到动力学模型中,进一步研究了柔性臂的性能,并扩展其在水中或其他致密粘性介质中的应用。此外,该研究团队将自适应视觉伺服控制方法应用到柔性臂的形状预测。
TILL等人基于经典的Cosserat rods理论,提出了一种预测柔性臂形状的动力学模型,为了提高计算效率,该研究中将偏微分方程中的时间导数隐式离散化,然后在每个时间步长上求解所得到的常微分方程的边值问题。DOROUDCHI等人制作了45 mm长的柔性驱动器,其局部驱动器采用新型的温度相应的水凝胶组成的立方体形式,每个驱动器都嵌入了加热器,并基于Cosserat rods理论模型对柔性驱动器开展了动力学建模的研究工作。该文章还提出了一种新型的测定水动力学参数的方法,即利用振动实验确定出软体臂的弯曲刚度和杨氏模量的参数值,最后得到模型和实验之间的误差率在10%以内。
基于动力学建模的方法不仅考虑了自身重力或外力对其形态的影响,还考虑了柔性臂自身运动过程中的速度和加速度等因素,相较于前面的两种模型,动力学模型适用范围更广。但是由于材料的非线性以及大变形等特性,实现对柔性臂动力学建模比较困难。
5.变刚度方法研究
柔性臂虽然可以利用自身的柔软特性去适应复杂的环境,但是在面临实际需要解决的问题时仍然存在较大的困难,比如需要用柔性臂对大负载的目标进行抓取或者需要输出非常大的力的情况下难以发挥其作用。将变刚度特性引入到柔性臂的制作中,这样不仅可以使得柔性臂既有柔软的、大形变的特性,还能保持较强的抗干扰能力和较大的输出力的能力,变刚度方法的引入使得柔性臂更加的实用化。
KIM等人利用层阻塞的原理实现了对柔性臂的刚度主动可控。该原理利用薄层材料之间存在的摩擦力,通过主动控制其内部的负压大小可以改变摩擦力的大小,进而改变柔性臂的刚度范围,如图22所示。
LI等人提出了一种新型的线驱动约束柔性臂,该机构的弯曲截面的长度和曲率都是可控的,利用柔性臂的机械约束来实现变刚度的特性。LI等人通过控制一个可以平移的管来实现柔性臂的刚度变化,虽然平移管到达的地方刚度会增加,但是也会牺牲柔性臂的弯曲能力。AL-RUBAIAI等人提出了一种基于三维印制导电聚乳酸(CPLA)材料的紧凑且经济高效的刚度调节机制,可编程逻辑阵列材料的导电性质允许通过焦耳加热方便地控制温度和刚度,通过刚度可调节进而改变软气动执行器(SPA)的形状,如图23所示。

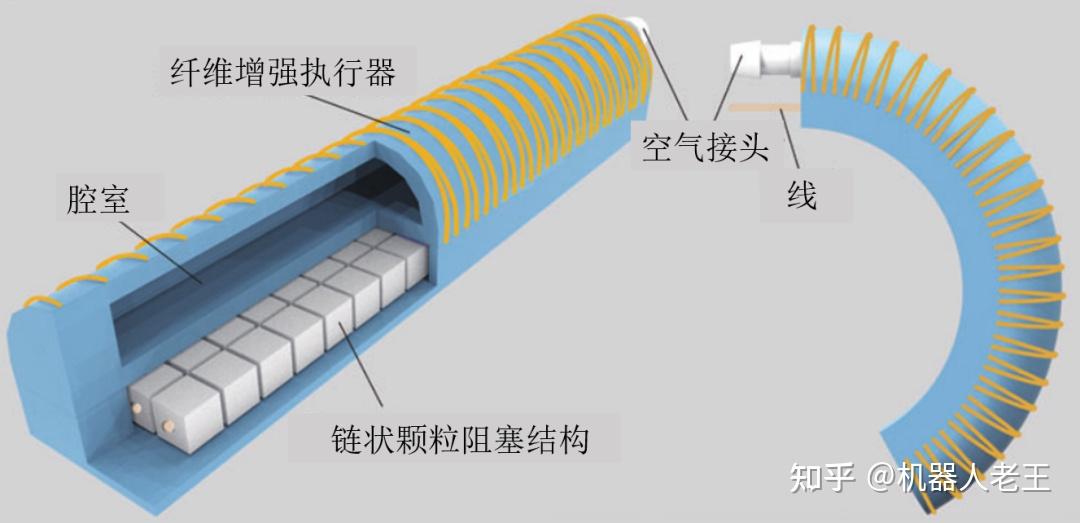
JIANG等人提出了一种链状颗粒阻塞方式,可在与现有基于真空的颗粒干扰系统完全不同的方法的基础上,立即实现大范围的刚度变化。如图24所示,该变刚度方式由数十个立方颗粒组装成链状结构,利用一根线将这些颗粒组合在一起,并且该线末端可由一个拉力装置进行拉伸的操作。通过控制线上的拉力大小就可以使得柔性臂展现出不同的刚度特性。
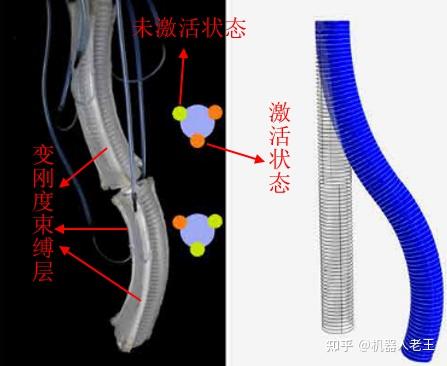
YANG等人在CHOI和KIM的研究基础上,将层阻塞变刚度的机理与多段柔性臂进行了组合。该方案采用抽真空形式改变柔性臂表面束缚层的刚度,进而实现对柔性臂的运动方向进行控制。如图25所示,通过模块化柔性臂以及控制变刚度层的激活状态就可以解锁柔性臂的多样式形变。
通过负压改变柔性臂刚度的方法优点是响应速度快,控制简单有效;缺点是需要提供额外的气动或液压源,进而导致整个系统的尺寸较为庞大。采用颗粒材料实现变刚度的方法简单易实现,不需额外增添较大的控制装置;缺点是需要大量的颗粒材料来实现高强度变化,而且大量的颗粒会限制柔性臂的运动范围。采用外界加热方式改变柔性臂刚度的方案适用反应速度较慢的场景,比如对静态目标的抓取。
6.关键研究技术和未来的发展趋势
近几年国内对于软体机器人的研究呈现出爆发增长的趋势。相较于刚性机械臂,柔性臂存在诸多优点,比如柔顺性好、自由度多、易于制造且成本低廉、环境适应能力强以及人机交互安全等。目前关键技术研究主要体现在以下5个方面:
1)柔性传感器的研发,现阶段对于柔性臂的控制大都是开环,如果想要提高柔性臂的控制精度,柔性传感器的引入是必不可少的一个环节;
2)抗负载能力的提升,柔性臂由软材料制作而成,较大的负载很可能导致柔性臂本体产生失稳变形,即需要大幅提高柔性臂的刚度以及输出力;
3)柔性臂本体结构进一步优化,即如何在保证柔性臂的多自由度运行的前提下,尽可能减少外部驱动源或整体结构做到最简化;
4)柔性臂的动力学建模,由于柔性臂的大变形以及材料非线性等特点,导致对于柔性臂动力学建模的研究依旧困难,因此只有清楚了解到柔性臂的动力学特性之后,我们才能更容易实现对柔性臂的精准控制;
5)动力源或驱动源补给问题,现阶段的柔性臂驱动都需要外部携带体积较大、重量较大的驱动设备,有的驱动器甚至还需要携带多个动力源,这就导致柔性臂运动的灵活性受到很大的限制,因此如何将驱动源的体积、重量以及数量尽可能的减少也是目前面临急需解决的关键技术之一。
对于柔性臂的发展趋势,未来有可能主要聚焦在如下三个方面:
1)从仿生学方面来讲,更加侧重机理的剖析,从更深层的生物机理去剖析生物的运动方式或驱动方式,而不再只是注重形状方面的模仿;
2)随着科学技术的不断发展,未来生物学家获取可以破译生物机电的刺激信号,如果这样的技术能够实现,后续很有可能就直接采用电刺激信号或其他方式刺激方式直接去控制生物本体;
3)柔性臂可编程设计是一个必然的发展趋势,现阶段所铸造的柔性臂大都是结构固定之后形状也就随之固定,很难再生成其他的运动方式。如果采用编程的设计方法,那么柔性臂的运动行为势必会大幅度提升。
文章来源:机器人技术与应用






评论0