
来源:https://zhuanlan.zhihu.com/p/615751805
重载机械臂的平衡缸主要用于平衡机械臂关节处的负载扭矩,降低关节对动力的需求,从而可以选用功率较小的电机,使得机体更加紧凑、节能低价。此外,通过平衡负载还可以用于改善系统的动态性能,达到更好的精度和响应。本文将从平衡系统的工作原理、理论模型、设计计算、系统维保等方面进行总结。
1 平衡系统工作原理
对于六轴工业机械臂来说,当臂展伸直后,2轴电机需要承受整个机器人大部分的自重和负载重量,加上运动时产生的惯性力和向心力等动态载荷,在中小负载的机型上靠电机的“抱闸”力矩和输出力矩来保持平衡,这要求电机的力矩参数大于2轴的负载力矩。
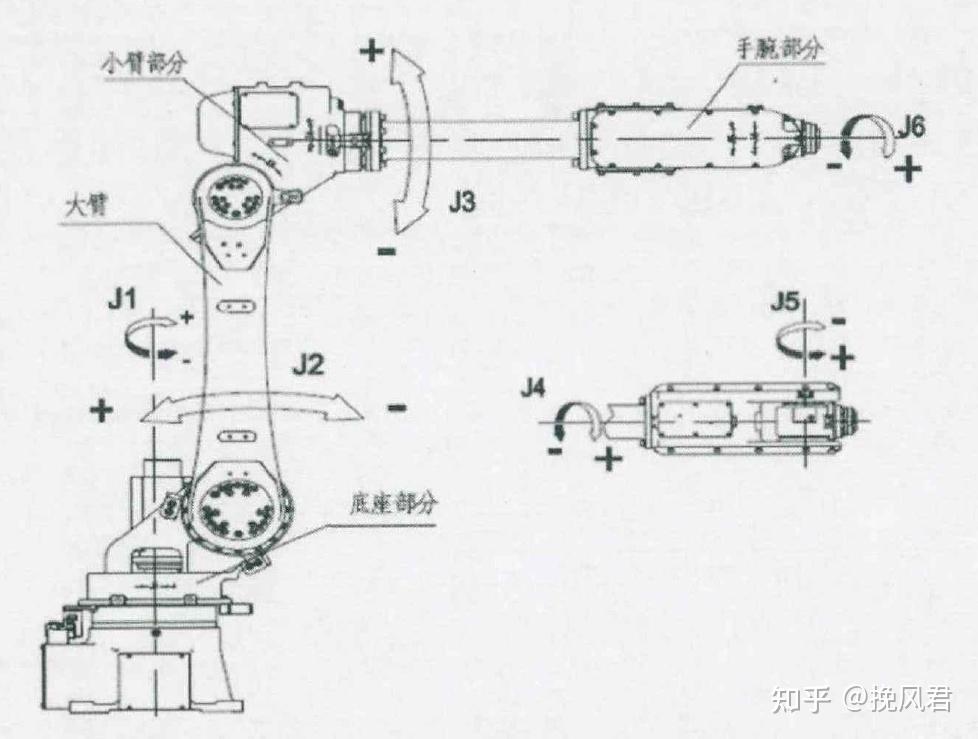
但当工业机械臂属于重载时,此处重载工业机器人通常指腕部有效负载在100kg以上,负载自重比在1:2~1:8之间的工业机械臂,机器人自重往往在1吨以上,如果只靠二轴电机将需要非常大的转矩要求,这需要比较昂贵且规格较大的电机才能满足,在成本、结构上都不划算。
这类机械臂为了降低关节驱动力矩,均带有平衡装置,通常在机器人本体结构设计时,将平衡装置设置在大臂、小臂和手腕处。目前,工业机器人的平衡系统主要有附加配重式、附加平衡电机式、弹簧缸式、气缸式、弹簧-凸轮式、液压-气动式等。
高速重载会加大机器人的非线性和惯性力矩,合理的平衡机构可以有效缩小机器人非线性以及非线性力矩,进而降低机器人电机输出力矩和机器人系统能量消耗。重载工业机器人的平衡系统在改善机器人性能方面起着以下4个作用:
(1)通过平衡装置产生的平衡力矩平衡掉部分偏重力矩,从而减少机器人关节的所需驱动力矩,达到降低能耗和成本的作用;
(2)在机器人运动中可以减小不平衡力矩的波动,减少对驱动系统的冲击,改善机器人动态特性;
(3)减小传动部件载荷,减少磨损和变形,提高寿命;
(4)降低特殊情况下对刹车装置的需求.
1.1 附加平衡电机式
附加平衡电机式是指在关节轴上增加一个伺服电机,用于产生与偏重力矩大小相等方向相反的力矩,来平衡自重引起的不平衡力矩。该方式需要增加一倍的电机和控制系统,造成浪费。
1.2 附加配重式
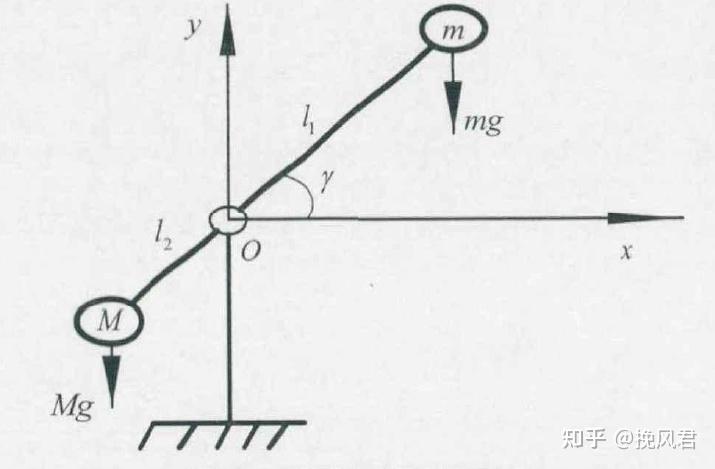
该方式通过在机器人连杆上增加平衡配重块来重新调整质量分布,以使连杆重心落在关节驱动轴线附近,从而达到平衡目的,该平衡机构简图如图2所示,静平衡条件为 ��1=��2
该方式在KUKA机型中可见应用,如图3所示为KUKA在J3轴的配重块。

使用配重块对于机械臂来说,是成本最低的方式,但这种方式会增加转动惯量和质量,增大了后继臂杆的负载,从而导致电机驱动力矩随之增大,动力学特性也变坏了,因此配重平衡式通常用于平衡力矩较小的机器人上。
1.3 恒力磁弹簧平衡系统
在轻型负载中,为了改善系统的动态性能,达到更好的精度和响应,还会在负载端增加恒力磁弹簧平衡系统,磁弹簧通常由动子、定子组成,其中,定子内壁安装有滑动轴承,为动定子之间的运动提供导向。磁弹簧的原理是利用动定子内永磁体的相互作用产生力,无需外部电源或控制,该作用力在行程范围内方向恒定,大小不变,相比机械弹簧来说,刚度好,力恒定,

磁弹簧与机械弹簧、气缸等对比结果如下:

1.4 液动/气动/气液混动缸平衡
(1)弹簧平衡缸——SSCBS
弹簧平衡系统是利用弹簧产生的弹簧力,来平衡机构产生的非线性力。弹簧平衡缸是采用多组弹簧相互嵌套,从而在占用较小空间的条件下实现尽量大的力矩,但这种方式使得平衡系统体积仍然很大,且对机器人的运动范围存在一定的限制,且弹簧寿命和弹簧力会随着使用次数的增多而逐渐不稳定。
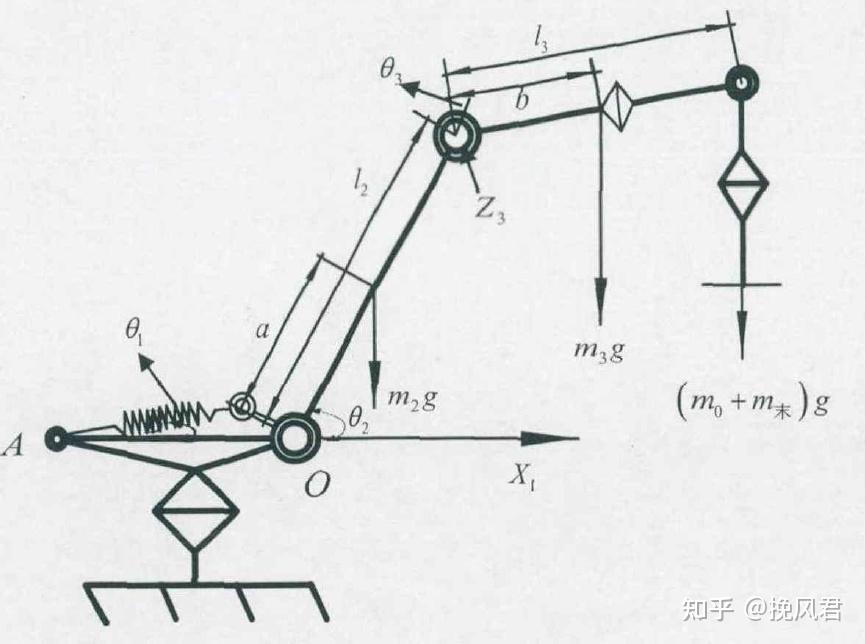
弹簧缸式的平衡系统如图所示,重力矩为 �=������� ,弹簧力矩为 ��=�Δ��1���� ,则不平衡力矩为
��=�−��
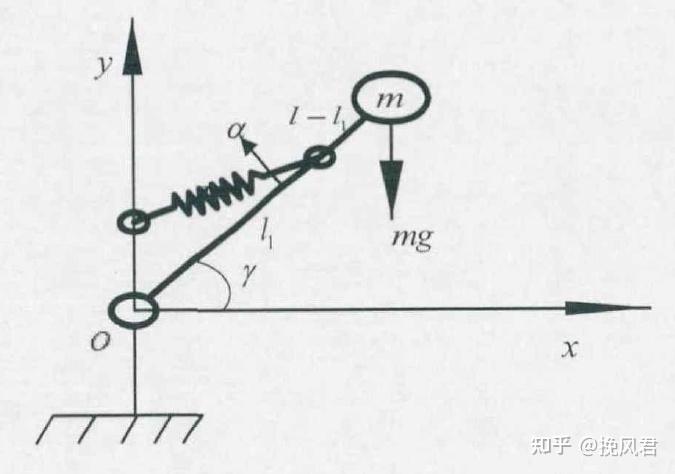
当负载存在加速度a时,负载惯量为I,则有机械臂的惯性力矩为 ��=�� ,因此
静平衡条件为: �Δ������=�������
动平衡条件为: �Δ��1����=�������+��
(2)液氮缸——HPCBS
在KUKA 160kg机型中,使用的是液压缸(隔膜蓄能器),该平衡缸的原理图如图,当机械臂向前伸展大臂时,液压缸被拽出,此时对大臂会施加一个反向力矩,用于克服2轴之后的机器人自重及负载重量。
(3)气压+弹簧——GSCBS
CAD2D3D:平衡缸内部构造和原理,常用于大型机床、重载机械手和机器人zhuanlan.zhihu.com/p/522783308
(4)活塞推杆平衡
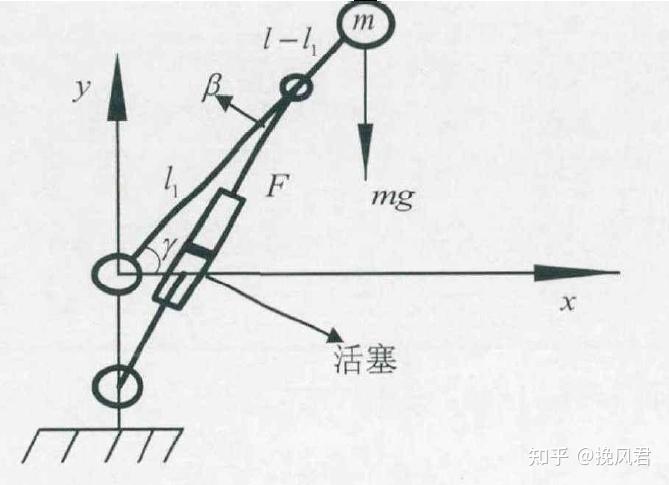
重载工业机器人的活塞式平衡系统通常有液压式、气动式两种,平衡条件如图所示,为 ��1����=�������
2.平衡缸选型
机械臂平衡缸是用于平衡大臂、小臂、手腕、负载因重力对机械臂2轴产生的力矩,以减小2轴电机的力矩要求,理论上来讲,希望平衡缸能够将2轴负载力矩全部平衡,但实际上是无法应用该种情况的,因此需要找到最优状态。
在当前应用中,弹簧缸和液压缸的应用较为广泛,选型流程如图

2.1 弹簧缸
机械臂2轴位于不同角度时,平衡缸对机械臂2轴平衡掉的力矩值是不同的,需要计算2轴转动到不同位置时平衡缸的受力情况,利用MATLAB对其进行计算。
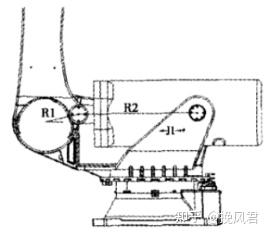
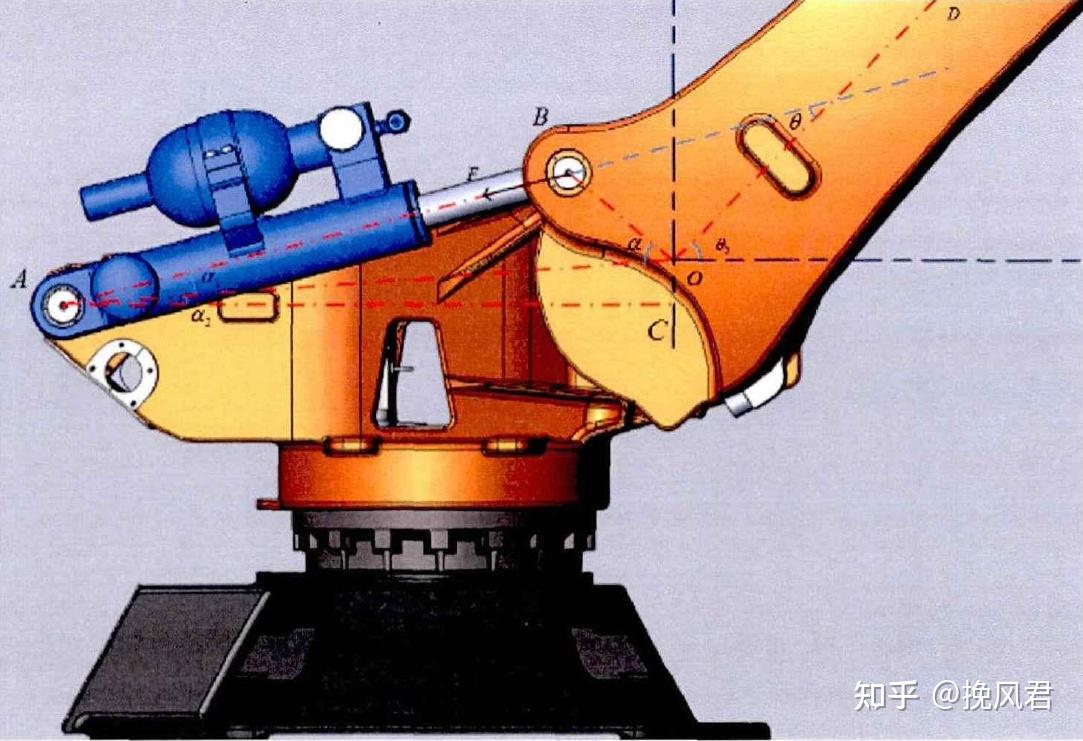
影响平衡缸的作用力对2轴形成的力矩,与平衡缸的刚度K、2轴中心与平衡缸移动点的距离R1,平衡缸固定点与移动点的距离R2的参数定义如图,为获得K、R1、R2的优化值,一般先对这三个参数在一定的取值范围内用MATLAB软件进行计算,获取其力矩图表,根据计算结果进行精确优化计算。
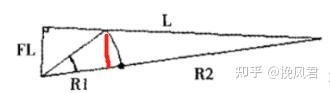
当A2转动θ角度后,平衡缸的计算几何图如下图所示,图中,L为平衡缸固定点到移动点的实时距离
FL为平衡缸的力对于2轴中心的力臂,

在图中根据余弦公式
���(�)=�12+(�1+�2)2−�22�1(�1+�2)
则: �=(�1+�2)2+�12−2(�1+�2)�1���(�)
平衡缸的伸长量计算为:
Δ�=�−�2
则平衡缸的出力为:
�=�Δ�
平衡缸的力对于2轴中心的力臂FL计算用相似三角形的方式,图中红色线段为关于R1+R2边长的垂线,该线段长度为 �1���(�) ,则有
�1���(�)�=���1+�2
故:
��=�1���(�(�1+�2))�
所以可以得到平衡缸提供的力矩:
�=���
用MATLAB来实现该计算过程,程序编写如下:
clc,clear
R1=200;
R2=400;
K=10;
theta=85;
for i=1:1:30
L=sqrt((R1+R2)^2+R1^2-2*(R1+R2)*R1*cosd(theta));
DeltaT(i)=L-R2;
F(i)=K*DeltaT(i);
FL(i)=R1*sind(theta)*(R1+R2)/L;
M(i)=F(i)*FL(i);
theta=theta-5;
end
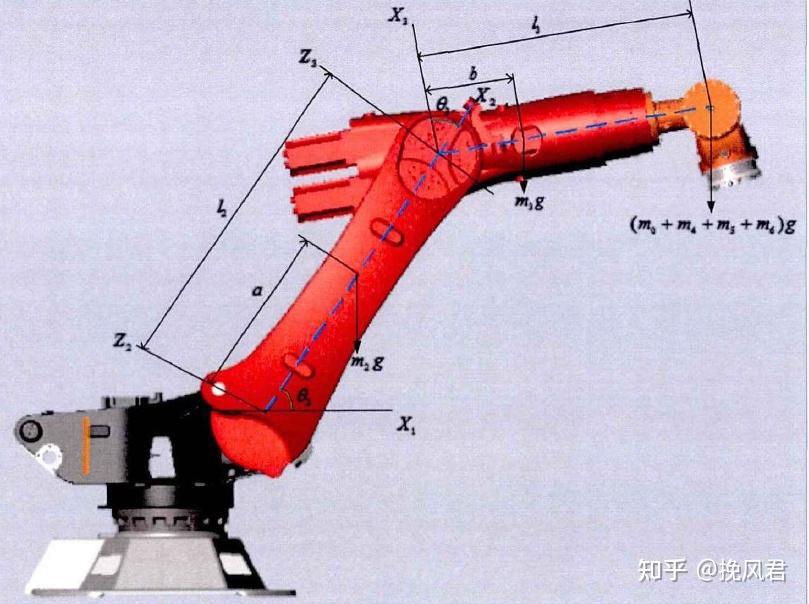
重载机器人负载偏重力矩计算如下:
末��=�2������2+�3�[�2����2+�����]+�末�(�2����2+�3����)
其中, �=�2+�3−90
理想情况下,产生的偏重力矩由弹簧缸平衡力矩全部平衡掉,即:
末���=�2������2+�3�[�2����2+�����]+�末�(�2����2+�3����)
根据具体机型的参数,可以进行相应的优化设计,此处不再详细阐述。
2.2 液气平衡缸
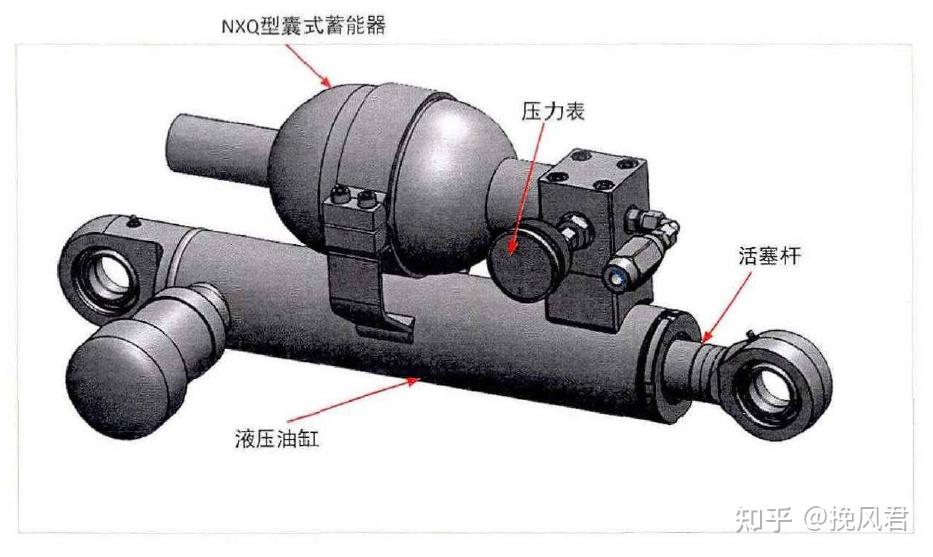
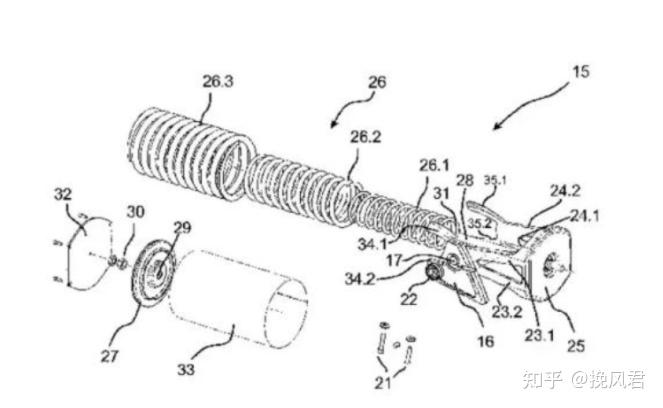
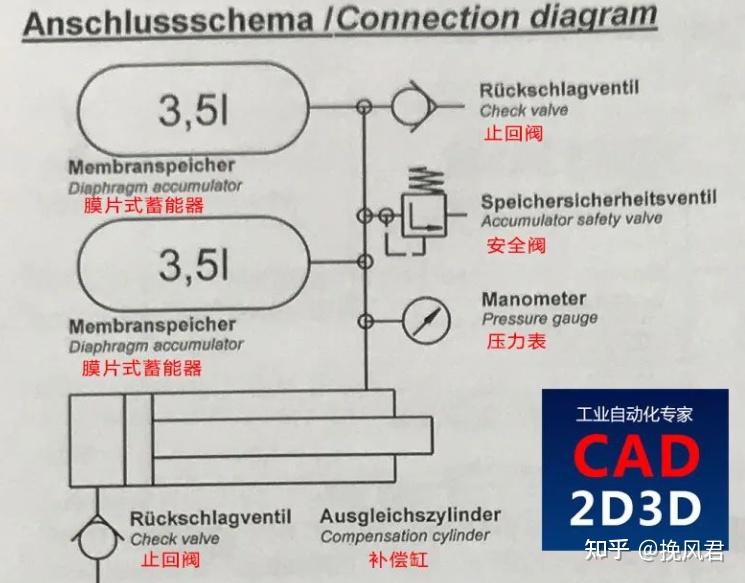
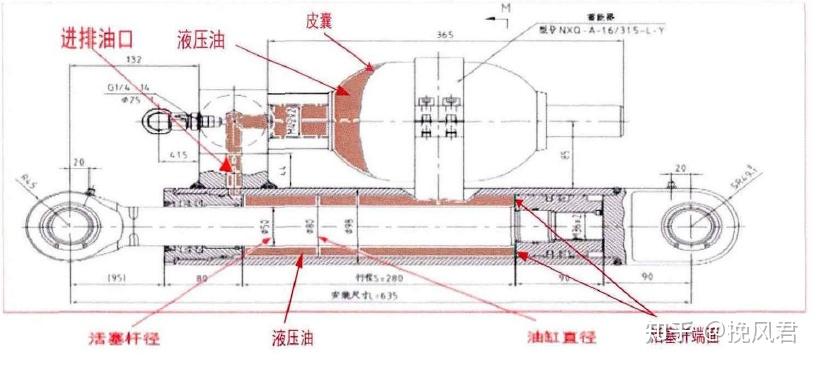
液气平衡装置如上图所示,其主要组成部件有:NXQ 型式蓄能器、液压油缸、压力表和活塞杆。其中,囊式蓄能器由油液部分和带有作为气密封隔离件的皮囊中的气体部分组成,位于皮囊周围的油液与油液回路接通,液压油缸内填充矿物液压油;压力表用于观测蓄能器皮囊内的实时气压;活塞杆与大臂连接,液气平衡装置产生的平衡力通过活塞杆传导至大臂。
选型计算与弹簧缸类似,但弹簧力需要换成液压力来计算,此处详细计算请参考文献[4]。
3 平衡缸结构
3.1 弹簧平衡缸
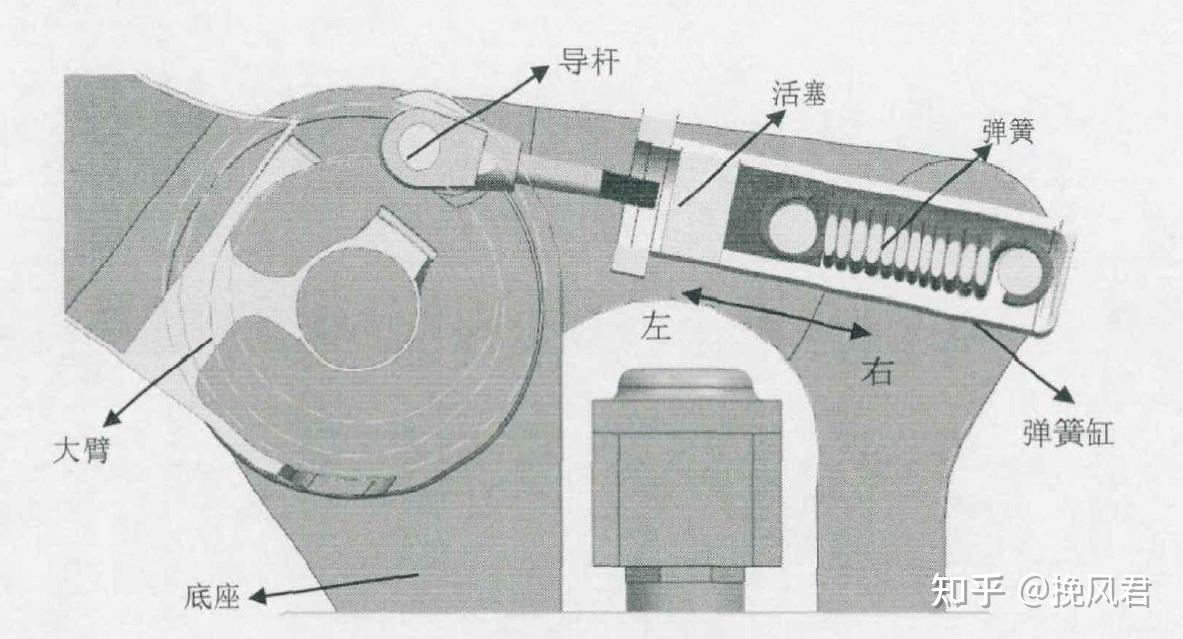
图为弹簧缸的结构示意图,重载工业机械臂的平衡对象主要是大臂,安装在大臂和腰底座上,主要组成部分有弹簧缸、弹簧、导杆,导杆的一端与大臂相连,另一端与活塞相连,活塞初始位置通过调节螺纹来改变活塞在弹簧缸中的位置,进而根据负载情况改变弹簧预紧力。弹簧缸的另一端固定在机器人底座上,机器人不工作时弹簧处于压缩状态,此时机器人大臂为竖直状态。若机器人大臂向左或向右方向运动时,活寒与导杆随着向左或向右移动。当机器人大臂逆时针转动时,活塞随着导杆向左运动,弹簧因受力被拉长,此时机器人大臂联动小臂及末端执行器下移,大臂、小臂及末端执行器的重力势能转变成弹簧的弹性势能储存下来。当机器人大臂顺时针转动时,活塞随着导杆向右运动,此时弹簧的弹性势能被释放,这个过程既减轻了机器人大鞋电机的负载,又给机器人一个缓冲期,提高机器人工作稳定性。
3.2 液气缸
由于液压油是不可压缩液体,因此利用液压油是无法蓄积压力能的,必须依靠其他介质来转换、蓄积压力能。皮囊式充气蓄能器就是利用气体(氮气)的可压缩性质工作的。重载机器人大臂的初始位置是垂直状态。如果大臂向正方向或者向负方向运动,活塞杆便随着向左或向右运动。当活塞杆向左运动时,就推动油缸中的液压油从进排油口进入蓄能器,油缸中的液压油便不断向蓄能器内充满氮气的皮囊加压,随着活塞杆的不断向左运动,皮囊的体积不断缩小,皮囊内氮气的压强也不断升高,直到活塞杆停止向左运动为止,此时皮囊内氮气的气压等于油缸中液压油的压强,这就是蓄能器储存能量的过程。当活塞杆向右运动时,液压油缸内的油压减小,蓄能器内的液压油便又从进排油口流回到液压油缸中,皮囊的体积不断变大,皮囊内氮气的压强也不断降低,直到活寨杆停止向右运动为止,此时皮囊内氮气的气压与油缸中液压油的压强达到平衡,这就是蓄能器释放能量的过程。通过油缸液压油产生的压强作用于活塞杆端面而产生平衡力并传导至大臂,从而实现机器人大臂的重力平衡。
4 平衡缸维保
随着机械臂的运行,平衡缸导向套部位需要定期加注润滑脂进行维护,液气类需要定期检查其压力值,是否低于设定压力值偏差范围之内,同时需要说明的是,平衡缸力矩小的地方是机械臂2轴零点位置。
KUKA机器人平衡缸维修mp.weixin.qq.com/s/8eMXTQ-41kqI1zDoVbfB9A
18- 18-KUKA机器人平衡缸更换流程mp.weixin.qq.com/s/F5HH53Mrud0Fa4FthOyGhQ
5 参考文献
[1] 工业机器人弹簧式平衡缸的参数研究
[2] 工业机器人平衡缸参数的分析与优化
[3] 重载工业机器人平衡系统研究
[4]重载机器人平衡系统参数优化与运动规划方法研究与实现






评论0