
来源:
https://automaticaddison.com/how-to-build-a-diy-aluminium-6-dof-robotic-arm-from-scratch
在本教程中,我们将从零开始制作一个具有六个自由度的机械臂。自由度是指描述一个系统的位置和方向所需的变量数量(例如,在我们机械臂的情况下,即 x、y、z 轴以及围绕这些轴的旋转)。
我们的目标是制作一个产品的早期原型,以便工厂、仓库和食品加工厂能够更轻松、更快速地抓取物体并将它们放入箱子中(即 抓取和放置 )。
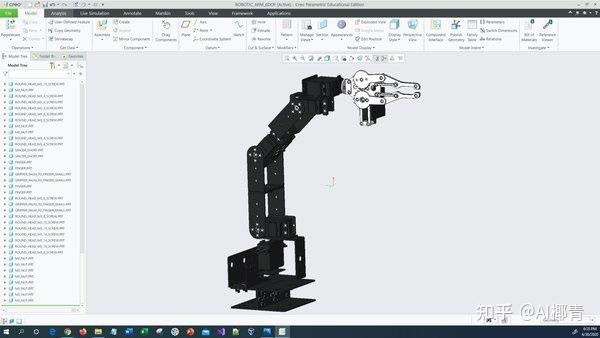
我在一个名为 Creo Parametric 的计算机辅助设计(CAD)程序中设计了这个机器人。以下是 STL 文件。
- 实际应用
- 先决条件
- 所需材料
- 操作步骤
- 拆开机械臂套件
- 组装底座
- 安装第一个舵机电机
- 安装第二个舵机电机
- 安装肘部
- 安装腕部
- 安装手部舵机
- 安装爪子
- 移动机械臂
实际应用
机械臂系统在现实世界中有许多应用。以下仅举几个例子:
- 仓库和物流
- 杂货店
- 医院和医疗中心
- 军队
- 食品加工厂
- 等等……
让我们开始吧!
先决条件
- 不需要任何先验知识。我们将从头开始构建一切。
所需材料
本节列出了完成此项目所需的所有组件。
- 6DOF 机械臂套件,配备 MG996R 舵机(机械臂)
- 十字螺丝刀
- 7/32 英寸扳手
- 9/32 英寸扳手
- 尖嘴钳
- 剪线钳
- 1 套公对母、母对母和公对公跳线
- 1 个 6 通道数字舵机测试仪
- 1 个带开关的 4xAA 电池盒
- 4 节 AA 电池
- 1 个直流可调电源,能够提供 30V/10A(你也可以使用带电线的 4 节 AA 电池盒或 6V、2800mAh 的镍氢电池组。但请注意,这些电池会很快耗尽)。
操作步骤
让我们开始组装机械臂。请仔细按照步骤操作,并花时间确保一切设置正确。我花了将近一周时间来组装这个机械臂。慢慢来。
手臂的组装说明在包装盒内,但无论如何我们还是来走一遍这个过程。
拆开机械臂套件
打开机械臂套件。将所有组件铺在桌子上。你应该有以下硬件部件:

- 1 个铝制夹持爪
- 1 个 L 型舵机支架
- 3 个 U 型机器人腰部支架
- 4 个长 U 型舵机支架
- 4 个微型球轴承
- 5 个多功能舵机支架
- 6 个 MG996R 舵机
- 6 套铝制舵机角
- 4 套圆头 M3×10 螺丝和 M3 螺母(10 表示长度为 10mm,包括头部)
- 20 套圆头 M3×8 螺丝和 M3 螺母
- 24 套平头 M4×10 螺丝和 M4 螺母(我从未使用过这些)
- 30 套圆头 M3×6 螺丝和 M3 螺母
- *注意:我所使用的套件上的螺丝没有标签,这使得在各个阶段确定使用哪种螺丝变得有些棘手。当需要的时候,只要使用能够放入孔中的螺丝和螺母即可。不要纠结于我在本教程中提到的确切螺丝类型。最终目标是确保每个部件都牢固。
组装底座
拿 6 个 M3×8 螺丝和螺母(这些螺丝从头部顶部到底部的长度为 8mm)。
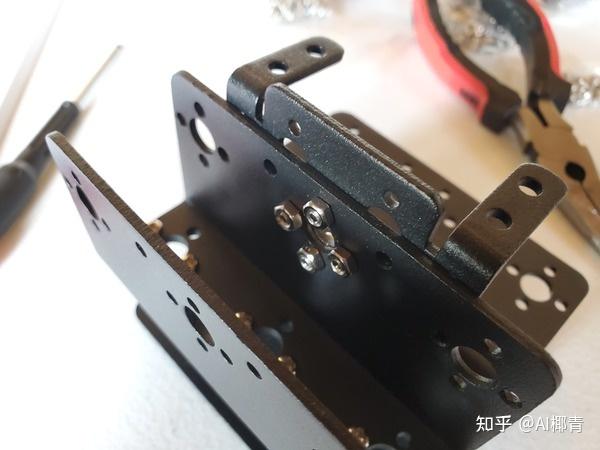
使用螺丝刀(建议在拧入螺丝和螺母时用尖嘴钳固定螺母),用 M3×8 螺丝和螺母将两个 U 型机器人腰部支架连接在一起。


拿第三个 U 型机器人支架,用六个 M3×8 螺丝和螺母将其固定在底座的一侧。

安装第一个舵机电机
拿一个 M3×10 螺丝、螺母和一个轴承。
拿一个多功能舵机支架。

将螺丝穿过孔。它可能有点难以穿过孔,所以要确保施加足够的力将其压入。
将轴承套在螺丝上,轴承的宽端接触多功能舵机支架。
将螺母套在螺丝上以固定轴承。
用 7/32 英寸扳手拧紧螺丝。

现在我们需要将多功能舵机支架固定到安装在机器人底座上方的 U 型支架上。用四个 M3×6 螺丝和螺母完成这项工作。
将其中一个舵机电机从包装袋中取出。
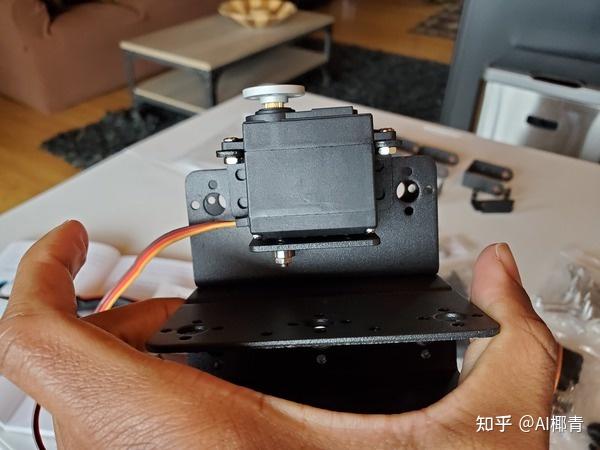
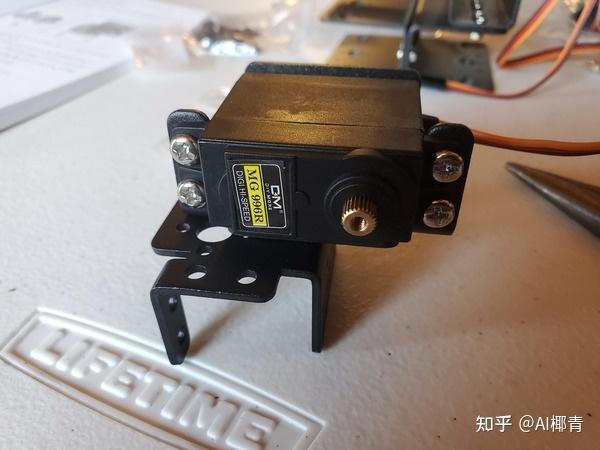
将其安装在多功能舵机支架的两个臂上。确保电机的安装方式与图中所示一致。我们将这个舵机电机称为 转向舵机。
拿四个 M3×8 螺丝和螺母(套件中最粗的螺丝和螺母)。用这些螺丝和螺母将转向舵机固定到位。
我建议用手指或尖嘴钳固定螺母,然后用十字螺丝刀将螺丝拧入螺母中。

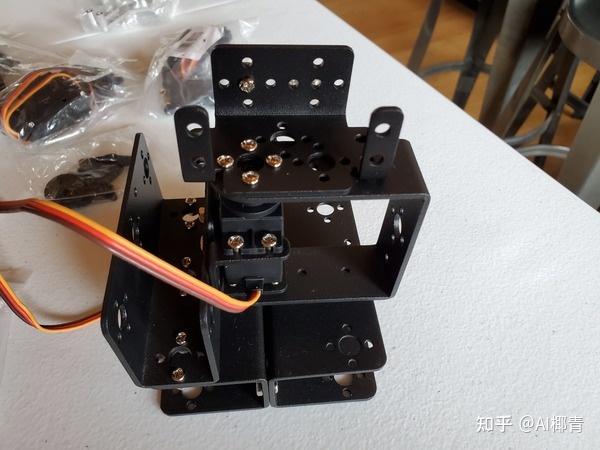
到目前为止,你的装置应该看起来像这样。

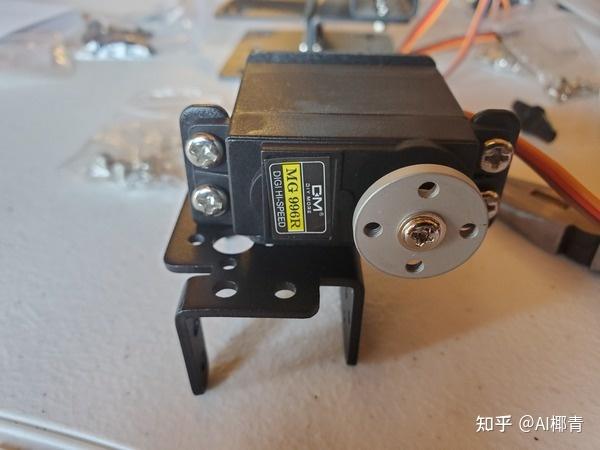
拿一个塑料摇臂。它应该在装有舵机电机的袋子中。
将摇臂安装在转向舵机的顶部。转向舵机的槽应与摇臂的槽完美契合。
摇臂应垂直于转向舵机轴(即转向舵机顶部的那个金色的、有槽的金属圆圈)。

现在用手指将摇臂向左和向右移动。
注意当用手指将摇臂向左拧时,摇臂停止转动的位置。
现在注意摇臂在右侧停止转动的位置。
重新定位摇臂,使其在转向舵机轴正好处于你刚刚标记的左右停止点的中点时垂直于转向舵机轴。

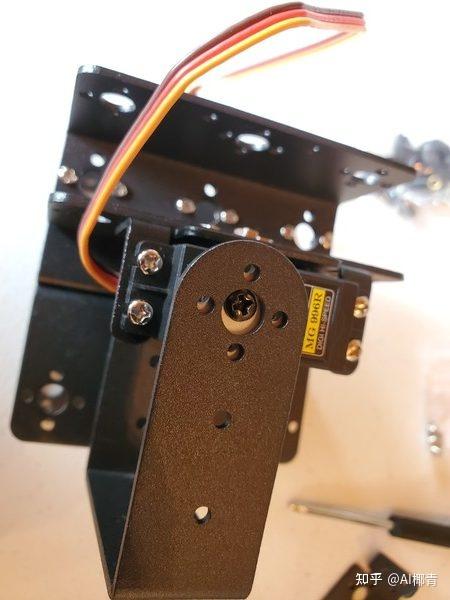
在用摇臂调整了转向舵机轴的角度后,拿一个舵机角。
小心地将摇臂直接向上拉起,使其脱离转向舵机轴。注意不要移动转向舵机轴。
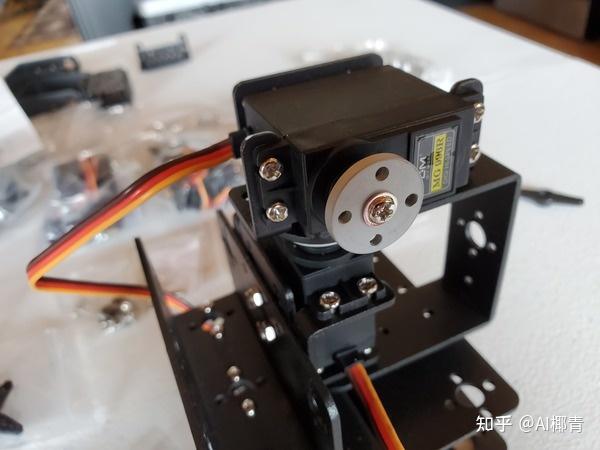
将舵机角安装到转向舵机轴上,使其看起来像这样。舵机角的一个孔应朝正前方。
将舵机角从右向左旋转。旋转范围应为 0-225°。
一旦确定舵机角正确安装在转向舵机轴上,用螺丝将其固定在中心位置。

拿一个长 U 型支架。
将长 U 型支架的孔套在舵机电机下方的轴承上。

将长 U 型支架的另一端套在舵机电机的顶部。长 U 型支架的大孔应位于螺丝上方。

拿一个小螺丝。
将螺丝放入长 U 型支架的一个小孔中。此时不要拧得太紧。

将长 U 型支架向左和向右移动。确保它能够接触到第三个 U 型机器人腰部支架的两侧。
现在,将刚才放入的螺丝取出。
安装第二个舵机电机
拿一个轴承、一个长螺丝和一个螺母。
拿一个多功能舵机支架。

用螺丝和螺母将轴承固定在多功能舵机支架上。

拿四个 M3×6 螺丝。
用螺丝将多功能舵机支架固定在长 U 型舵机支架的上方。
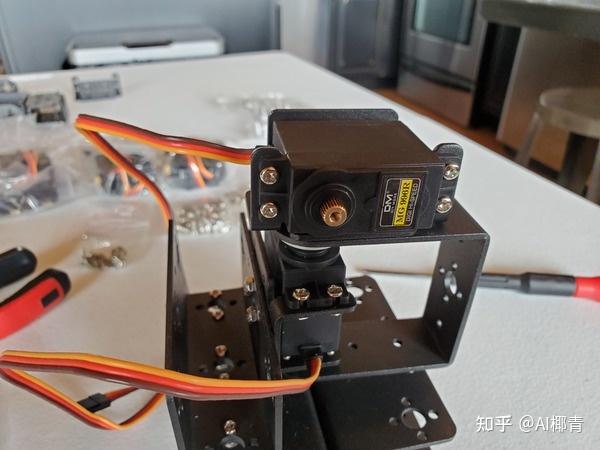
拿另一个舵机。这个舵机将被称为臂舵机,因为它负责抬起和放下机械臂。

将其放入多功能舵机支架中。
用四个粗螺丝(M3×8)和螺母将舵机固定到位。建议用尖嘴钳固定螺母,同时用十字螺丝刀拧紧螺丝。
拿一个塑料摇臂。它应该在装有舵机电机的袋子中。
将摇臂安装在转向舵机的顶部。转向舵机的槽应与摇臂的槽完美契合。
摇臂应垂直于转向舵机轴(即转向舵机顶部的那个金色的、有槽的金属圆圈)。
现在用手指将摇臂向左和向右移动。
注意当用手指将摇臂向左拧时,摇臂停止转动的位置。
现在注意摇臂在右侧停止转动的位置。
重新定位摇臂,使其在转向舵机轴正好处于你刚刚标记的左右停止点的中点时垂直于转向舵机轴。
在用摇臂调整了转向舵机轴的角度后,拿一个舵机角。

小心地将摇臂直接向上拉起,使其脱离转向舵机轴。注意不要移动转向舵机轴。
将舵机角安装到转向舵机轴上,使其看起来像这样。舵机角的一个孔应朝正前方。
将舵机角从右向左旋转。旋转范围应为 0-225°。
一旦确定舵机角正确安装在转向舵机轴上,用螺丝将其固定在中心位置。
拿一个长 U 型支架。
将长 U 型支架的孔套在多功能支架一侧的轴承上。
将长 U 型支架的另一端套在舵机电机的顶部。长 U 型支架的大孔应位于螺丝上方。
拿四个 M3×6 螺丝。
将四个螺丝放入长 U 型支架的小孔中。
将长 U 型支架向左和向右移动。确保它能够完全活动。当你将其向右扭转时,它应该会碰到第一个 U 型支架。这是正常的。

现在,我们将把一个长 U 型舵机支架固定到你刚刚固定好的 U 型支架上。
拿一个长 U 型舵机支架和四个 M3×6 螺丝和螺母。
你的机械臂应该能够向后和向前完全活动。

安装肘部
现在,我们需要安装肘部。
拿一个 L 型舵机支架、一个多功能舵机支架、一个轴承、一个 M3×10 螺丝和一个螺母。

用 M3×10 螺丝和螺母将轴承固定在多功能舵机支架上。

拿两个 M3×6 螺丝和螺母。如果你已经用完了 M3×6 螺丝,只要使用套件中能够穿过孔的螺丝和螺母即可。有时套件中可能没有你需要的所有螺丝,而且我收到的套件中的螺丝没有标签,这更增加了难度。
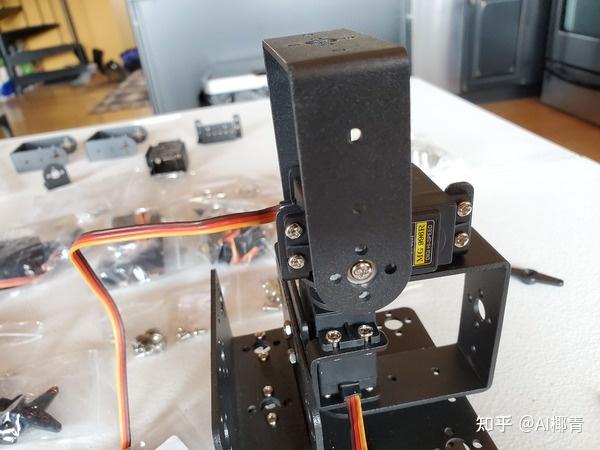
如下面的图片所示,用两个螺丝和螺母将 L 型舵机支架固定在多功能舵机支架上。

拿最后一个长 U 型支架。

用两个 M3×6 螺丝和螺母将 U 型支架固定在 L 型支架上。

拿一个舵机电机。
将舵机电机放入多功能舵机支架中。
用四个 M3×8 螺丝和螺母将舵机电机固定在多功能舵机支架中。同样,如果你没有足够的 M3×8 螺丝和螺母,不要担心。目标是使用螺丝和螺母将舵机电机固定在支架中。

拿一个塑料摇臂。它应该在装有舵机电机的袋子中。
将摇臂安装在转向舵机的顶部。转向舵机的槽应与摇臂的槽完美契合。

现在注意摇臂在右侧停止转动的位置。
重新定位摇臂,使其在转向舵机轴正好处于你刚刚标记的左右停止点的中点时垂直于转向舵机轴。
在用摇臂调整了转向舵机轴的角度后,拿一个舵机角。
小心地将摇臂直接向上拉起,使其脱离转向舵机轴。注意不要移动转向舵机轴。
将舵机角安装到转向舵机轴上,使其看起来像这样。
将舵机角从右向左旋转。旋转范围应为 0-225°。
一旦确定舵机角正确安装在转向舵机轴上,用螺丝将其固定在中心位置。

将带有附装舵机电机的多功能舵机支架放入顶部 U 型支架内。
用四个螺丝将其固定到位。

安装腕部
拿两个多功能支架。
拿一个轴承、一个螺丝和一个螺母。将它们附装到其中一个多功能支架上。

拿两个 M3×6 螺丝和螺母。用这些螺丝和螺母将多功能支架连接在一起。

拿一个舵机电机,并将其放入其中一个多功能支架中。
拿四个 M3×8 螺丝,将舵机电机固定到位。

拿一个臂舵,并将其安装在舵机轴上。
与我们对其他舵机电机所做的类似,臂舵在舵机的左右转动的中点处应保持直立。
一旦你对角度感到满意,将臂舵取下,并用舵机角替换。
在舵机角的中间插入一个螺丝以将其拧紧。
将多功能支架放入 U 型支架内。
用舵机角螺丝将舵机角固定到位。
安装手部舵机
拿另一个舵机电机。
将舵机电机放入顶部的多功能支架中。
用四个螺丝和螺母将舵机电机固定在多功能支架中。
在舵机轴的顶部安装一个臂舵,并按照我们之前所做的一样找到中点。你希望臂舵在舵机电机的中点处垂直于舵机电机。

安装爪子
在手部舵机角的中心插入一个螺丝。
拿两个螺丝,将爪子固定在手部舵机角上。
拿最后一个舵机和四个 M3×6 螺丝。
用螺丝将最后一个舵机固定在爪子上。如果你用完了螺丝,可以随意从机器人的底座上取一些螺丝。

拿一个臂舵,并将其安装在舵机轴的顶部。
找到舵机轴的中点。找到中点后,将臂舵放在轴的顶部,使其直立。
小心地将臂舵取下。
将舵机角套在舵机轴上。
用一个小螺丝将舵机角固定在舵机轴上。你应该使用的是颈部靠近头部处有一个类似圆盘或垫圈的螺丝。不要拧得太紧。
将爪子调整到打开的位置。
拿两个小黑色螺丝。
用两个黑色螺丝将爪子的松散部分固定在舵机角上。
检查你是否能够打开和关闭爪子。爪子应该能够完全闭合。
就这样。如果你已经做到这一步,你就已经组装好了你的机械臂的主体。
移动机械臂
你的机械臂有六个电机(六个自由度)。要移动你的机械臂,你可以购买一个六通道数字舵机测试仪(你可以在 eBay 或 AliExpress 上找到),并按照[这篇文章]中解释的方式进行操作。
https://automaticaddison.com/how-to-control-a-servo-motor-with-a-servo-controller
你只需要将数字舵机测试仪连接到电源(例如 6V……可以是一个 4 节 AA 电池盒),并将你的舵机连接到测试仪上。几分钟内你就可以开始操作了。






评论0