
来源:https://zhuanlan.zhihu.com/p/556098145
在设计好六自由度机械臂的控制程序(包含上位机及下位机)后,我们需要通过实验来验证机械臂的精度与可行性。
精度的判断显然是需要定量分析的。本篇文章是参考GBT 12642-2013工业机器人性能规范及其试验方法(Industrial robots-Perfo rmance criteria and related test methods)并结合自身经济实力设计的较简陋且不够严谨的位姿重复性实验。同样,仅供参考。
一、概述
1.位姿准确度和位姿重复性
位姿准确度表示指令位姿和从同一方向接近该指令位姿时的实到位姿平均值之间的偏差。位姿准确度分为:
- 位置准确度:指令位姿的位置与实到位置集群中心之差
- 姿态准确度:指令位姿的姿态与实 到姿 态平均值之差
位姿重复性(RP)表示对同一指令位姿从同一方向重复响应n次后实到位姿的一致程度。对某一位姿 ,重复性可表示为:
- 以下式计算且以位置集群中心为球心的球半径RP之值
- 围绕平均值a,b和c的角度散布±3S_a、±3S_b、±3S_c ,其中S_a、S_b、S_c为标准偏差。
位置准确度和重复性如下图所示:
姿态准确度和重复性如下图所示:
2.实验条件(仅列举一部分)
(1)测试前条件
机器人应装配完毕,并可全面操作。所有必要的校平操作、调整步骤及功能试验均圆满完成。除位姿特性的漂移试验应由冷态开始外,不管制造商是否有规定,其余的试验在试验前应进行适当的预热运行。
若机器人具有由用户使用的、会影响被测特性的设备,或如果只能用特殊函数来记录特性(如离线编程给出的位姿校准设施)的设备,则试验中的状态必须在试验报告中说明,并且(与某种特性有关时)每次试验中均应保持不变。
(2)环境条件
环境条件包括:温度、相对湿度、电磁场和静电场、射频干扰、大气污染和海拔高度极限。
(3)机械接口的负载
所有试验项目都应在 100% 额定负载条件下进行,即制造商规定的质量、重心位置和惯性力矩。额定负载条件应在试验报告中注明。为表征机器人与负载有关的性能,可采用将额定负载减至 10% 或由制造商指定的其他数值进行附加试验。如部分测量仪器附加于机器人上,应把其质量和位置当作试验负载的一部分。
(4)试验用末端执行器
(5)试验速度
所有位姿特性试验都应在指定位姿间可达到的最大速度下进行,即在每种情况下速度补偿均置于100% ,并可在此速度的50%和或10%下进行附加试验。
(6)运动要求
当机器人在各位姿间运动时,所有关节均应运动。
试验时,应注意不超出制造操作规范。
(7)位姿重复性试验条件
3.不同级别机械臂的位姿重复精度标准
下图绿色方框中的是库卡公司的KR4R600机械臂说明书中表示的位姿重复精度。
下图在绿色方框中的是2021中国工程机器人大赛暨国际公开赛(RoboWork)桌面机械臂项目规则说明中注明的重复定位精度。
综合上两张图,我们不难发现工业级机械臂的位姿重复性通常可达0.01mm,而桌面级机械臂的位姿重复性可达0.5mm。
我们使用的机械臂也就勉强算个桌面级机械臂,只要最后实验结果达到0.5mm就算合格。
二、实验设计
测定位姿重复性的方法分为非接触型测定与接触式测定。其中,非接触式测量精度高、成本高,常应用于工业级机械臂的位姿重复性测试;接触式测量精确度低、成本低,常应用于桌面级机械臂的位姿重复性测量。
我们使用接触式测量就足够了,杀鸡焉用宰牛 。
1.计算方法
我们可根据记录的数据计算六自由度机械臂的位姿重复性,位姿重复性由位置重复性与姿态重复性 组成。n次响应后末端执行器在空间中形成的实际位姿点阵可看作被包围在一个半径为 ,球心坐标为 的球内,如下图所示。
包含实际位姿点阵的球体
(1)位置重复性
(2)姿态重复性
2.测量方法
在P_f处布置两个用于测量位姿偏差的百分表。布置方式如下图所示,百分表1的测头与基坐标系的 轴平行且反向,百分表2的测头位于基坐标系的平面,与轴夹角为45°且与 轴夹角为135°。
将起始位姿与终止位姿储存于轨迹点寄存器中。
编写指令。
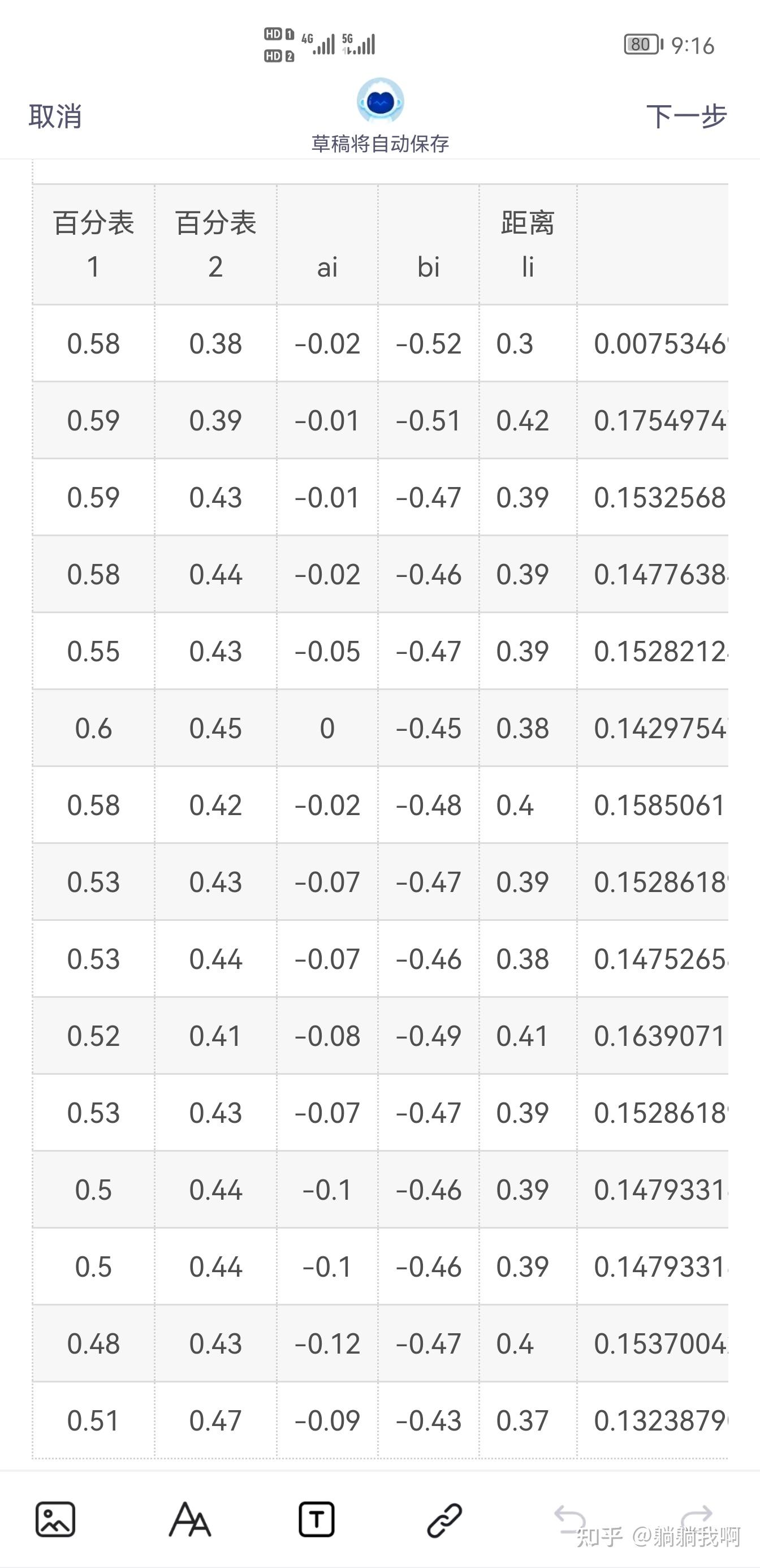
三、实验数据
机械臂运行速度为50%时位姿重复性实验数据






评论0