
来源:https://zhuanlan.zhihu.com/p/106206594
基础入门
1. 首先对机械臂的整体认识:
http://blog.exbot.net/archives/3337
2.CSDN上一个博主写的抓取、机械臂控制、机械臂抓取的代码解析:
https://blog.csdn.net/zzu_seu/article/details/94617814
https://blog.csdn.net/zzu_seu/article/details/89293241
https://blog.csdn.net/zzu_seu/article/details/91347757
进阶攻略
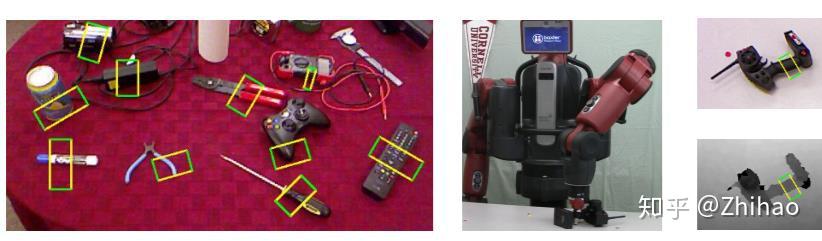
1.项目主要为了确定抓取位置,物体的哪个位置最容易抓取,最适合抓取,所产生的结果如下图所示,最好的抓取位置通过一个长方形框出。
代码地址:https://github.com/tnikolla/robot-grasp-detection
论文:Real-Time Grasp Detection Using Convolutional Neural Networks

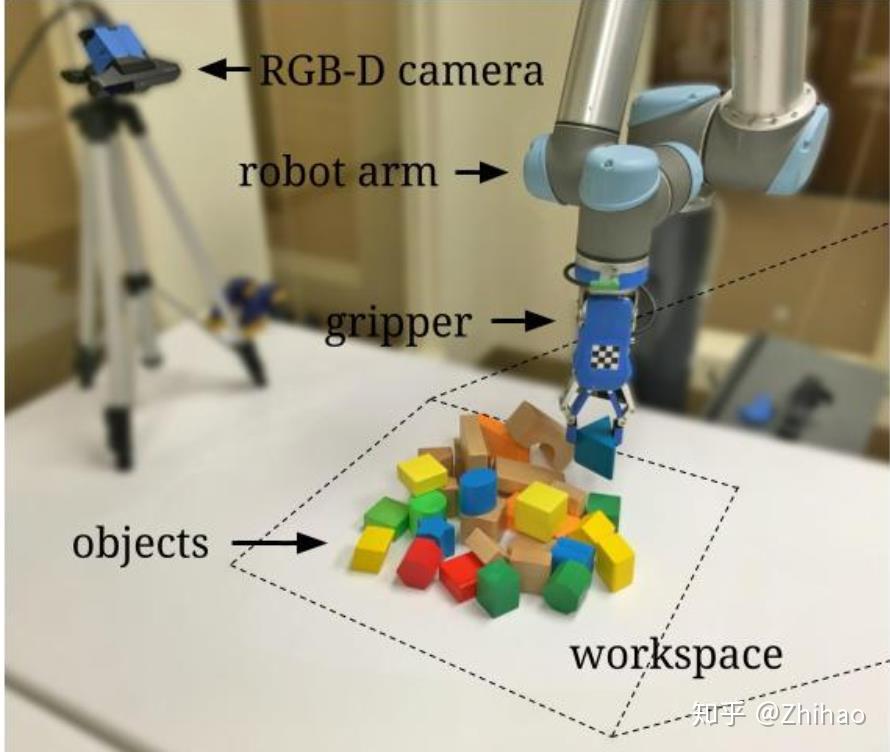
2. 分别通过VERP仿真、UR5,实现了机械臂的抓取。
代码地址:https://github.com/andyzeng/visual-pushing-grasping
论文:Learning Synergies between Pushing and Grasping with Self-supervised Deep Reinforcement Learning
3. 代码地址:https://github.com/mirsking/Deep_learning_for_detectin_robotic_grasps/tree/master/deepGraspingCode
论文:Deep Learning for Detecting Robotic Grasps
通过matlab实现。
4.代码地址:https://github.com/dougsm/ggcnn
论文:Closing the Loop for Robotic Grasping: A Real-time, Generative Grasp Synthesis Approach
5.在GAZEBO仿真中,实现的机器人抓取
https://github.com/jsbruglie/grasp

6. 此项目在Amazon Robotics Challenge2017(https://www.amazonrobotics.com/#/)中拿到了第一名。
代码地址:https://github.com/caomw/arc-robot-vision
论文:Robotic Pick-and-Place of Novel Objects in Clutter with Multi-Affordance Grasping and Cross-Domain Image Matching

7. 通过ROS2实现的机器人抓取
https://github.com/JuFengWu/techman_robot_grasp_ros2
8.通过ROS实现UR机器人抓取。
https://github.com/chjohnkim/MaskRCNN_Grasp_Detection/tree/master/maskrcnn
9.通过ROS实现带有机械臂的移动机器人抓取。






评论0