
来源:https://zhuanlan.zhihu.com/p/1962670404729550392
今天和某机器人同仁交流,得知由于没有Ethercat转CANFD的设备,暂时选择周立功的以太网转CAN/FD临时作为项目前期使用。原因是认为以太网转CAN/FD和Ethercat转CANFD形式比较类似。
先抛开以太网和Ethercat在软件层面的巨大差异,来看看周立功的以太网转CAN/FD的参数是不是适合机器人控制。
第一看收发帧率

单看收发帧率还凑合,能到1.3 – 1.6W帧每秒,但是注意看下方备注

这一看不得了,两个重要信息
- 测试是测试单个通道的情况,也就是说,多个通道同时使用,帧率恐怕无法达到标注性能(大概率按8/4通道会均分)。
- 测试数据为0字节数据域,这个就有点不厚道了。合着1.3-1.6W帧都是传空数据的测试结果,0字节数据测试对用户根本没有意义。无论机器人应用还是汽车,都不可能只传0数据帧!
第二看转发延迟

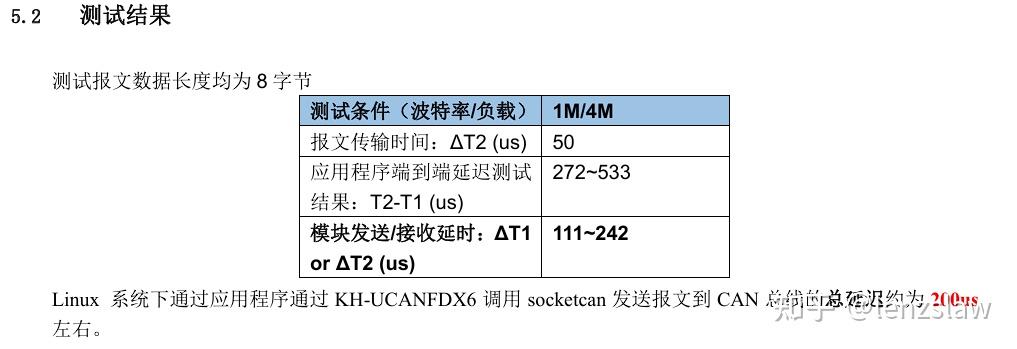
好,帧率结果看完,再看看转发延迟。通讯延迟会极大影响机器人关机控制实时性,业普遍要求不能高于200us
周立功以太网转CANFD的转发延迟为不高于2ms,给到这种结果,一般来说可能延迟大部分就在1ms多。
这个延迟对于机器人关节控制通讯来说显然是不可接受的。
好了,两项参数分析下来,这个选型是否合适大家已经了然。
其实对于CAN/FD接口设备,国内做的好的厂家寥寥无几,做好功能容易,做好性能难,做到极致性能和稳定性难上加难。这里不得不说还是德国老派厂家做的更好,但是耐不住价格太贵。
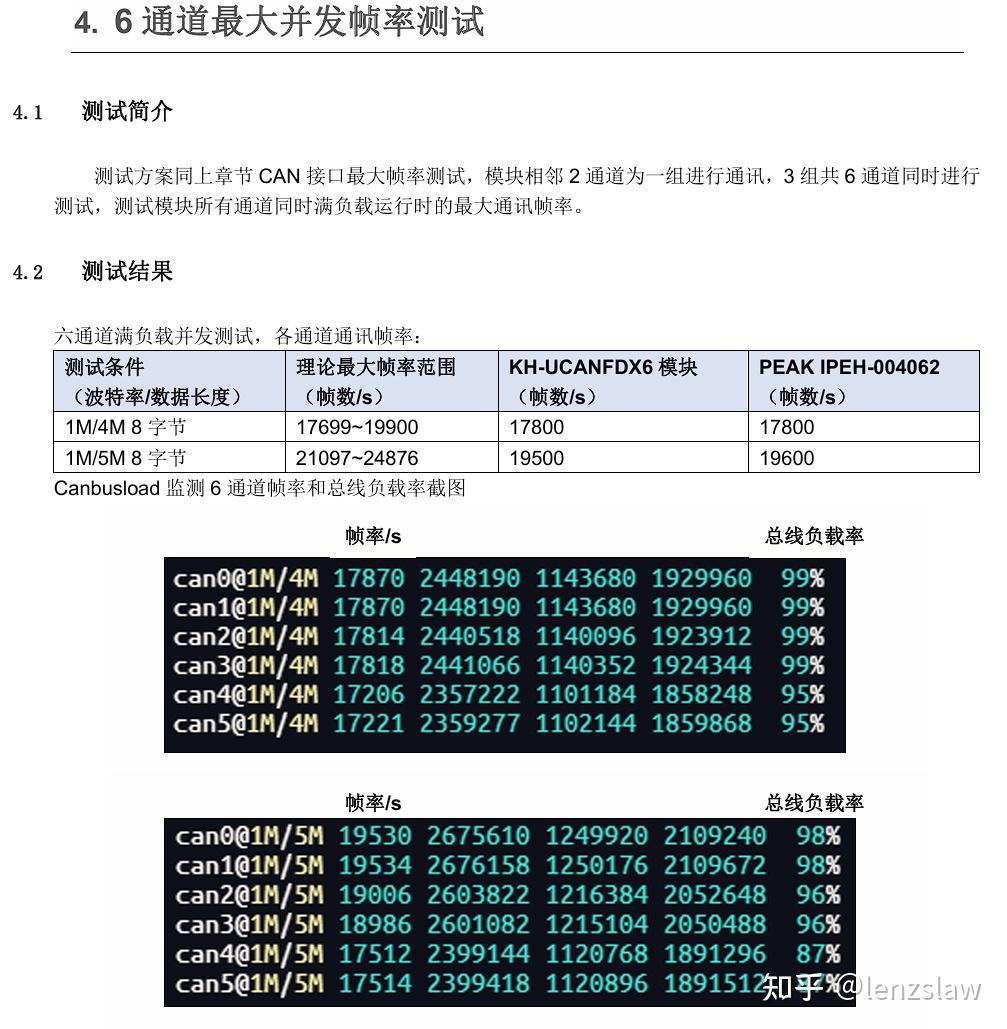
好在国内也做的好的(价格也便宜的),下面是相关的性能参数,可以作为选型参考
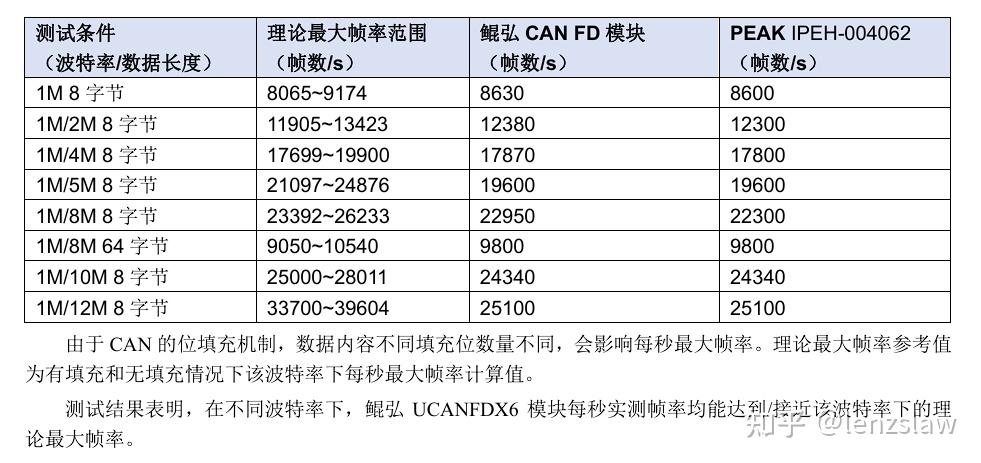
帧率测试
这个测试就很实在,各个波特率/字节数都给出了详细数据






评论0