
来源:https://zhuanlan.zhihu.com/p/1953863647915934385
《机器人学导论》第三版(John Craig等)的力位混合控制写的比较抽象,结合《现代机器人学》第四版(凯文 林奇等),继续总结机械臂控制方法。并以UR5机械臂为例,在MUJOCO仿真中执行一个力位混合控制。复用前面位置控制的代码。
代码仓库:https://github.com/DrNingZhi/robot_sim
4. 笛卡尔空间的力位混合控制
(1) 静止状态下的力控
一般情况下,在力控任务期间,机器人运动缓慢或不运动,因此忽略速度和加速度,机器人的动力学模型是
�=�(�)+������
考虑具有前馈和重力补偿的PI力控制器
�=�(�)+��[��+��(��−�)+��∫(��−�)��]
要求在施加力的方向上需要有施力对象,否则机械臂将持续运动至不受控。
控制器的实现为
class RobotForceController:
def __init__(self, kp, ki, robot_model, ee_body_name, ee_point_on_body):
self.kp = kp
self.ki = ki
self.robot_model = robot_model
self.ee_body_name = ee_body_name
self.ee_point_on_body = ee_point_on_body
self.F_err_int = np.zeros(6)
def update(self, q, qd, F_d, F):
tau_grav = self.robot_model.gravity_torque(q)
jac = self.robot_model.jacobian(q, self.ee_body_name, self.ee_point_on_body)
self.F_err_int += F_d - F
tau = tau_grav + jac.T @ (F_d + self.kp * (F_d - F) + self.ki * self.F_err_int)
return tau在xml模型中增加一个固定的墙壁(加在worldbody下)
<body name="obstacle" pos="0.805 0 1.2" quat="1 0 0 0">
<geom pos="0 0 0" quat="1 0 0 0" type="box" rgba="0.7 0.7 0.7 0.5" size="0.005 1 1" condim="1"/>
</body>增加一个sphere作为末端执行器(加在wrist_3_link的body下)
<geom name="end_effector" pos="0 0 0.025" quat="1 0 0 0" type="sphere" rgba="1 0 0 1" size="0.025" condim="1"/>注意到这里condim=”1″是先假设接触没有摩擦力的情况。
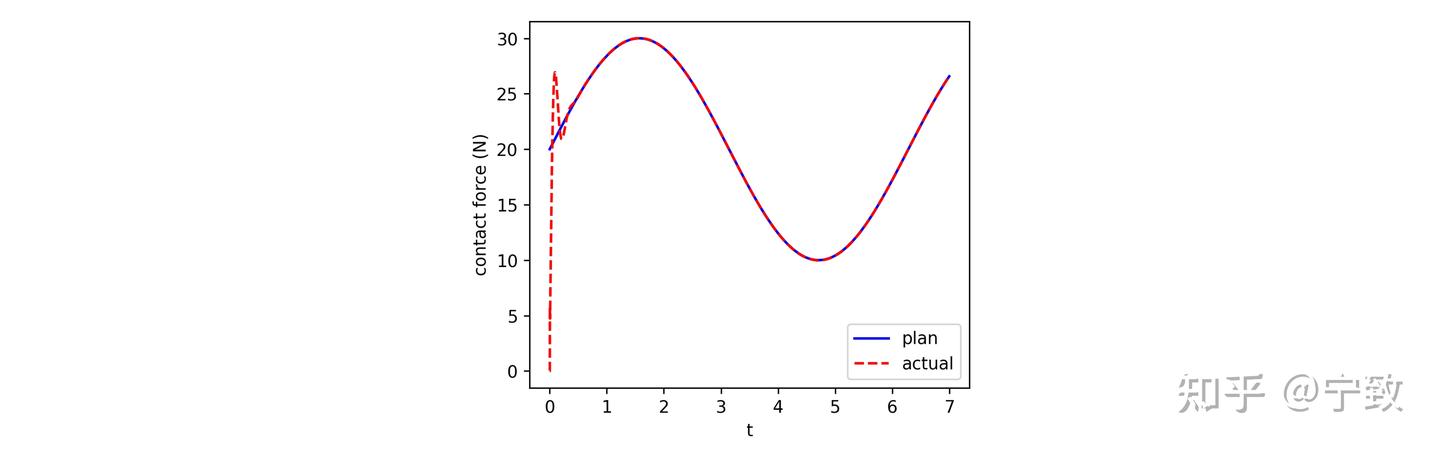
在mujoco中仿真机械臂对一个墙壁施加正弦变化的力:
import numpy as np
import mujoco
import mujoco.viewer
mjcf_file = "ur5/ur5.xml"
model = mujoco.MjModel.from_xml_path(mjcf_file)
data = mujoco.MjData(model)
dt = model.opt.timestep
dof = model.nv
robot_model = RobotModel(mjcf_file)
# Initialize joint states
target = np.eye(4)
target[:3, :3] = rotation
target[:3, 3] = pos[0]
q0 = robot_model.inverse_kinematics(
target, "wrist_3_link", point_at_body=np.array([0, 0, 0.05]), smooth=False)
data.qpos = q0
data.qvel = np.zeros(dof)
# Initialize controller
kp = 0.05
ki = 0.05
robot_controller = RobotForceController(
kp, ki, robot_model, "wrist_3_link", np.array([0, 0, 0.05])
)
F_dir = 20.0 + 10.0 * np.sin(t)
step = 0
with mujoco.viewer.launch_passive(model, data) as viewer:
while viewer.is_running() and step < len(t):
f, p = get_contact_force(model, data, "end_effector")
show_contact_force(viewer, f, p)
F = np.zeros(6)
if not len(f) == 0:
F = np.array([f[0][0], 0.0, 0.0, 0.0, 0.0, 0.0])
F_d = np.array([F_dir[step], 0.0, 0.0, 0.0, 0.0, 0.0])
data.ctrl = robot_controller.update(data.qpos, data.qvel, F_d, F)
mujoco.mj_step(model, data)
viewer.sync()
step = step + 1其中,用到mujoco获取接触力的函数:
def get_contact_force(model, data, geom_name):
# 获取作用在body_name上的作用力
forces = []
positions = []
if data.ncon == 0:
return forces, positions
geom_id = model.geom(geom_name).id
for i in range(data.ncon):
if data.contact[i].geom1 == geom_id:
p = data.contact[i].pos
efc_address = data.contact[i].efc_address
dim = data.contact[i].dim
contact_force = data.efc_force[efc_address : (efc_address + dim)]
if dim == 1:
f = contact_force * data.contact[i].frame[:3]
else:
f = data.contact[i].frame.reshape(3, 3).T @ contact_force[0:3]
forces.append(f)
positions.append(p)
if data.contact[i].geom2 == geom_id:
p = data.contact[i].pos
efc_address = data.contact[i].efc_address
dim = data.contact[i].dim
contact_force = data.efc_force[efc_address : (efc_address + dim)]
if dim == 1:
f = contact_force * data.contact[i].frame[:3]
else:
f = data.contact[i].frame.reshape(3, 3).T @ contact_force[0:3]
forces.append(-f)
positions.append(p)
return np.array(forces), np.array(positions)以及在mujoco中可视化作用力(用一条线段表示力的大小和方向)
def show_contact_force(viewer, f, p, scale=0.01):
viewer.user_scn.ngeom = 0
num = 0
for i in range(len(f)):
mujoco.mjv_initGeom(
viewer.user_scn.geoms[num],
mujoco.mjtGeom.mjGEOM_LINE,
np.zeros(3),
np.zeros(3),
np.zeros(9),
np.array([0.0, 0.0, 1.0, 1.0]),
)
start_point = p[i]
end_point = p[i] + scale * f[i]
mujoco.mjv_connector(
viewer.user_scn.geoms[num],
mujoco.mjtGeom.mjGEOM_LINE,
2.0,
start_point,
end_point,
)
num += 1
viewer.user_scn.ngeom = num仿真效果如下图所示(机械臂静止,对墙壁施加正弦变化的力)
(2) 力位混合控制
很多情况下,机械臂也需要一边运动一边施加力,就需要力位混合控制。
机械臂末端一般有6个自由度,一般情况下每个方向上同时要么是位置控,要么是力控。
采用对角矩阵S描述位置控制的空间方向,如果某个方向是位置控,则S对应的对角元素是1,否则是0。那么对应的力控的空间方向对角矩阵是I-S。
在位置控制的方向上,采用前面的笛卡尔空间位置控制方法;而在力控制的方向上,添加前面的力控制器。
首先考虑一个简单的情况,即速度较小时,可以只考虑重力前馈。控制率为
�=��{�{��[��−��(�)]+��(�˙�−��˙)}+(�−�)[��(��−�)+��∫(��−�)��]}+�(�)
控制器的具体实现为:
class RobotForcePositionController:
def __init__(self, kp_pos, kd_pos, kp_frc, ki_frc, robot_model, ee_body_name, ee_point_on_body,):
self.kp_pos = kp_pos
self.kd_pos = kd_pos
self.kp_frc = kp_frc
self.ki_frc = ki_frc
self.robot_model = robot_model
self.ee_body_name = ee_body_name
self.ee_point_on_body = ee_point_on_body
self.F_err_int = np.zeros(6)
def update(self, q, qd, pos_ref, rotmat_ref, vel_ref, angvel_ref, F, F_d, S):
tau_grav = self.robot_model.gravity_torque(q)
jac = self.robot_model.jacobian(q, self.ee_body_name, self.ee_point_on_body)
self.F_err_int += F_d - F
tau = tau_grav + jac.T @ (
(np.eye(6) - S) @ (self.kp_frc * (F_d - F) + self.ki_frc * self.F_err_int)
)
pos, rotmat = self.robot_model.forward_kinematics(
q, self.ee_body_name, self.ee_point_on_body
)
p = pos_ref - pos
R = rotmat.T @ rotmat_ref
w = rotmat @ Rotation.from_matrix(R).as_rotvec()
pos_err = np.hstack((p, w))
ee_vel_ref = np.hstack((vel_ref, angvel_ref))
vel_err = ee_vel_ref - jac @ qd
tau += jac.T @ (S @ (self.kp_pos * pos_err + self.kd_pos * vel_err))
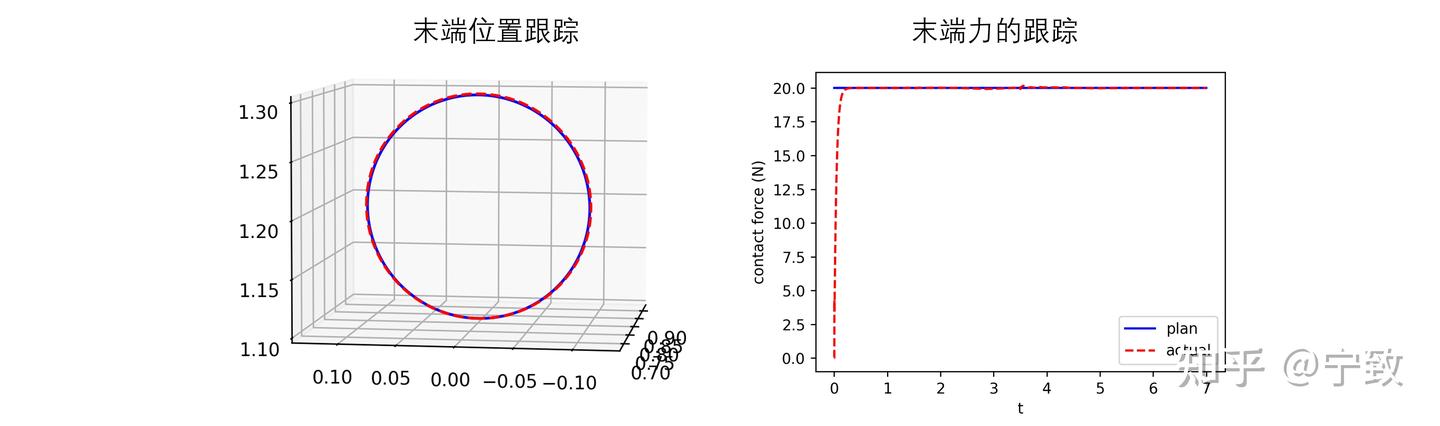
return tau接下来,首先考虑一个任务,末端接触墙壁,执行一个圆形轨迹,并对墙壁持续输出20N的力。这里的力控制是x方向,其他5个方向是位置控制。实现为:
import numpy as np
import mujoco
import mujoco.viewer
from scipy.spatial.transform import Rotation
mjcf_file = "ur5/ur5.xml"
model = mujoco.MjModel.from_xml_path(mjcf_file)
data = mujoco.MjData(model)
dt = model.opt.timestep
dof = model.nv
robot_model = RobotModel("ur5/ur5.xml")
center = np.array([0.8, 0.0, 1.2])
radius = 0.1
orientation = Rotation.from_rotvec([0.0, np.pi / 2, 0.0]).as_matrix()
period = 5.0
t, pos, vel, acc = circular_trajectory(center, radius, orientation, dt, period)
# Initialize joint states
target = np.eye(4)
target[:3, :3] = rotation
target[:3, 3] = pos[0]
q0 = robot_model.inverse_kinematics(
target, "wrist_3_link", point_at_body=np.array([0, 0, 0.05]), smooth=False)
data.qpos = q0
data.qvel = np.zeros(dof)
# Initialize controller
kp_pos = np.array([2000.0, 2000.0, 2000.0, 100.0, 100.0, 100.0])
kd_pos = np.array([20.0, 20.0, 20.0, 1.0, 1.0, 1.0])
kp_frc = np.ones(6) * 0.05
ki_frc = np.ones(6) * 0.05
robot_controller = RobotForcePositionController(
kp_pos, kd_pos, kp_frc, ki_frc, robot_model, "wrist_3_link", np.array([0, 0, 0.05])
)
S = np.eye(6)
S[0, 0] = 0.0
step = 0
with mujoco.viewer.launch_passive(model, data) as viewer:
while viewer.is_running() and step < len(t):
f, p = get_contact_force(model, data, "end_effector")
show_contact_force(viewer, f, p)
F = np.zeros(6)
if not len(f) == 0:
F = np.array([f[0][0], 0.0, 0.0, 0.0, 0.0, 0.0])
F_d = np.array([20.0, 0.0, 0.0, 0.0, 0.0, 0.0])
data.ctrl = robot_controller.update(data.qpos, data.qvel, pos[step], orientation, vel[step], np.zeros(3), F, F_d, S)
mujoco.mj_step(model, data)
viewer.sync()
step = step + 1仿真结果如下:

力和位置的跟踪效果:
既然是力位混合控制,那么可以想象到另一种情况,即力控方向上,如果障碍物在移动时,机械臂也随之移动并施加期望的力。
首先,在xml模型中增加一个joint来控制墙壁的移动
<body name="obstacle" pos="0.805 0 1.2" quat="1 0 0 0">
<geom pos="0 0 0" quat="1 0 0 0" type="box" rgba="0.7 0.7 0.7 0.5" size="0.005 1 1" condim="1"/>
<joint name="joint_barrier" type="slide" pos="0 0 0" axis="1 0 0" range="-10 10"/>
</body>并增加actuator来控制运动
<position name="joint_barrier" joint="joint_barrier" ctrllimited="false" kp="1000000" kv="10000"/>增加了一个自由度后,系统的自由度发生变化,在这里,为了保证机械臂的运动学模型正确,用没有墙壁的原模型初始化robot_model,而用有墙壁的模型执行仿真:
import numpy as np
import mujoco
import mujoco.viewer
from scipy.spatial.transform import Rotation
mjcf_file = "ur5/ur5_with_movable_obstacle.xml"
model = mujoco.MjModel.from_xml_path(mjcf_file)
data = mujoco.MjData(model)
dt = model.opt.timestep
dof = model.nv
robot_model = RobotModel("ur5/ur5.xml")
center = np.array([0.8, 0.0, 1.2])
radius = 0.1
orientation = Rotation.from_rotvec([0.0, np.pi / 2, 0.0]).as_matrix()
period = 5.0
t, pos, vel, acc = circular_trajectory(center, radius, orientation, dt, period)
# Initialize joint states
target = np.eye(4)
target[:3, :3] = rotation
target[:3, 3] = pos[0]
q0 = robot_model.inverse_kinematics(
target, "wrist_3_link", point_at_body=np.array([0, 0, 0.05]), smooth=False)
data.qpos = np.hstack((q0, 0.0))
data.qvel = np.zeros(dof)
# Initialize controller
kp_pos = np.array([2000.0, 2000.0, 2000.0, 100.0, 100.0, 100.0])
kd_pos = np.array([20.0, 20.0, 20.0, 1.0, 1.0, 1.0])
kp_frc = np.ones(6) * 0.05
ki_frc = np.ones(6) * 0.05
robot_controller = RobotForcePositionController(
kp_pos, kd_pos, kp_frc, ki_frc, robot_model, "wrist_3_link", np.array([0, 0, 0.05])
)
S = np.eye(6)
S[0, 0] = 0.0
p_barrier = 0.1 * np.sin(t)
step = 0
with mujoco.viewer.launch_passive(model, data) as viewer:
while viewer.is_running() and step < len(t):
f, p = get_contact_force(model, data, "end_effector")
show_contact_force(viewer, f, p)
F = np.zeros(6)
if not len(f) == 0:
F = np.array([f[0][0], 0.0, 0.0, 0.0, 0.0, 0.0])
F_d = np.array([20.0, 0.0, 0.0, 0.0, 0.0, 0.0])
data.ctrl[:6] = robot_controller.update(data.qpos[:6], data.qvel[:6], pos[step], orientation, vel[step], np.zeros(3), F, F_d, S)
data.ctrl[-1] = p_barrier[step]
mujoco.mj_step(model, data)
viewer.sync()
step = step + 1仿真结果如下:
这里实现的只是最简单的情况,我们可以想到,如果障碍物不是一个平面,而我们希望始终对物体施加切向的力。书中也讨论了这种情形,需要将控制表达式中的雅可比转化为末端执行器坐标下。针对这种情况,后续再做讨论。
注意到,这里的接触没有考虑摩擦。事实上即使考虑摩擦,位置跟踪也可以较好实现(感兴趣可以试试)。实际上,本文的力控方法称作直接力控,在实际应用中并不常用也并不好用。更多用到的是阻抗控制或导纳控制。可以方便地处理各个方向上不同的控制表现。将在后续继续讨论。






评论0