
来源:https://zhuanlan.zhihu.com/p/1947982685357217203
本篇为第二部分,末端执行器笛卡尔空间的位置跟踪控制方法。
根据《机器人学导论》第三版(John Craig等)的机械臂控制章节,总结机械臂控制方法。并以UR5机械臂为例,在MUJOCO仿真中执行一个末端圆形轨迹,以对比不同方法的效果。
代码仓库:github.com/DrNingZhi/robot_sim
3. 笛卡尔空间的位置控制
在前面部分中,需要将末端运动轨迹,转化为关节空间运动轨迹,需要对整个轨迹求解逆运动学,计算复杂度高。本篇主要讨论直接进行笛卡尔空间的控制。
3.1 笛卡尔空间的直接控制方法-逆雅可比控制
逆雅可比控制:期望末端位姿和反馈的实际位置的差异,乘以雅可比的逆,转化为关节角度差异,然后通过增益控制器,得到关节驱动力。
�=��⋅�−1[��−��(�)]
注意到,这里的末端位姿偏差(认为很小),被当作期望减小偏差所需要的末端速度,因此通过逆雅可比矩阵转化为关节速度。这里的kp的size仍然等于自由度,和关节对应。
末端位姿应该是6d的,用6d向量表示姿态,书中没有具体讲应该怎么处理,如果用XYZ+欧拉角表示,那么这里的角速度就是欧拉角速度,可能不对。这里我的看法是,要对应角速度,应该将期望姿态和实际姿态的偏差,转化为轴角表示。
首先,将上述控制律分解为位置和姿态
�=��⋅�−1[��−���]
其中,w表示姿态偏差的轴角,首先获得偏差的旋转矩阵。然后可通过Rodrigues公式的逆计算轴角(见《机器人学导论》或《仿人机器人》相关章节)。可以直接利用现有的库实现。然而,需要注意的是,由于R是从当前姿态到目标姿态的旋转,因此得到的w是相对当前姿态坐标系的,需要再转到世界坐标系(需要注意!)
�=�����,
�=��⋅������(�)
显然,上面的控制率没有包含速度反馈。虽然书中指出可以添加速度反馈,但并未明确如何添加,按照我的理解,应该是:
�=��⋅�−1[��−��(�)]+��⋅�−1(�˙�−��˙)
针对这一控制方法的代码实现:
class RobotJacInvController:
def __init__(self, kp, kd, robot_model, ee_body_name, ee_point_on_body):
self.kp = kp
self.kd = kd
self.robot_model = robot_model
self.ee_body_name = ee_body_name
self.ee_point_on_body = ee_point_on_body
def update(self, q, qd, pos_ref, rotmat_ref, vel_ref, angvel_ref):
pos, rotmat = self.robot_model.forward_kinematics(
q, self.ee_body_name, self.ee_point_on_body
)
jac = self.robot_model.jacobian(q, self.ee_body_name, self.ee_point_on_body)
p = pos_ref - pos
R = rotmat.T @ rotmat_ref
w = rotmat @ Rotation.from_matrix(R).as_rotvec()
pos_err = np.hstack((p, w))
q_err = np.linalg.pinv(jac) @ pos_err
ee_vel_ref = np.hstack(vel_ref, angvel_ref)
vel_err = ee_vel_ref - jac @ qd
qd_err = np.linalg.pinv(jac) @ vel_err
tau = self.kp * q_err + self.kd * qd_err
return tau修改mujoco的仿真主循环
import numpy as np
import mujoco
import mujoco.viewer
from scipy.spatial.transform import Rotation
mjcf_file = "ur5/ur5.xml"
model = mujoco.MjModel.from_xml_path(mjcf_file)
data = mujoco.MjData(model)
dt = model.opt.timestep
dof = model.nv
robot_model = RobotModel(mjcf_file)
center = np.array([0.8, 0.0, 1.2])
radius = 0.1
rotation = Rotation.from_rotvec([0.0, np.pi / 2, 0.0]).as_matrix()
period = 5.0
t, pos, vel, acc = circular_trajectory(center, radius, rotation, dt, period) # 不需要执行ik,计算耗时显著降低。
# Initialize joint states
target = np.eye(4)
target[:3, :3] = rotation
target[:3, 3] = pos[0]
q0 = robot_model.inverse_kinematics(
target, "wrist_3_link", point_at_body=np.array([0, 0, 0.05]), smooth=False)
data.qpos = q0
data.qvel = np.zeros(dof)
# Initialize controller
kp = np.array([1000.0, 1000.0, 1000.0, 10.0, 10.0, 0.1])
kd = np.array([10.0, 10.0, 10.0, 0.1, 0.1, 0.001])
robot_controller = RobotJacInvController(
kp, kd, robot_model, "wrist_3_link", np.array([0, 0, 0.05])
)
step = 0
with mujoco.viewer.launch_passive(model, data) as viewer:
while viewer.is_running() and step < len(t):
data.ctrl = robot_controller.update(
data.qpos, data.qvel, pos[step], orientation, vel[step], np.zeros(3)
)
mujoco.mj_step(model, data)
viewer.sync()
step = step + 1可以得到开篇视频的仿真结果。可以注意到,kp和kd参数用回和前面关节pd控制相同。有趣的是,跟踪效果也和关节pd控制是相似的:
证明两种方法是等效的,但笛卡尔空间控制方法,避免了求整条轨迹的逆运动学,计算复杂度显著降低。
3.2 笛卡尔空间的直接控制方法-转置雅可比控制
虽然上面的方法避免了全轨迹的逆运动学,但一般情况下,求矩阵的逆也是较为复杂的运算。尤其大多数情况下jacobian矩阵不是方阵,只能求解伪逆,精度显著降低。而转置雅可比控制可以避免求雅可比矩阵的逆。
转置雅可比控制:期望末端位姿和反馈的实际位置的差异,通过增益控制器,得到等效末端驱动力。然后乘以雅可比的转置,转化为关节驱动力。
�=���=��{��[��−��(�)]+��[�˙�−��˙]}
这里的pd参数是空间6d对应的pd参数,不再是关节对应的pd参数。虽然书中也没有明确如何添加速度反馈,但这里的速度反馈是明确的。
控制方法的代码实现:
class RobotJacTController:
def __init__(self, kp, kd, robot_model, ee_body_name, ee_point_on_body):
self.kp = kp
self.kd = kd
self.robot_model = robot_model
self.ee_body_name = ee_body_name
self.ee_point_on_body = ee_point_on_body
def update(self, q, qd, pos_ref, rotmat_ref, vel_ref, angvel_ref):
pos, rotmat = self.robot_model.forward_kinematics(
q, self.ee_body_name, self.ee_point_on_body
)
jac = self.robot_model.jacobian(q, self.ee_body_name, self.ee_point_on_body)
p = pos_ref - pos
R = rotmat.T @ rotmat_ref
w = rotmat @ Rotation.from_matrix(R).as_rotvec()
pos_err = np.hstack((p, w))
ee_vel_ref = np.hstack((vel_ref, angvel_ref))
vel_err = ee_vel_ref - jac @ qd
tau = jac.T @ (self.kp * pos_err + self.kd * vel_err)
return tau在mujoco仿真主循环中,修改kp和kd为末端六维值,进行控制器初始化:
kp = np.array([2000.0, 2000.0, 5000.0, 100.0, 100.0, 100.0])
kd = np.array([20.0, 20.0, 50.0, 1.0, 1.0, 1.0])
robot_controller = RobotJacTController(
kp, kd, robot_model, "wrist_3_link", np.array([0, 0, 0.05])
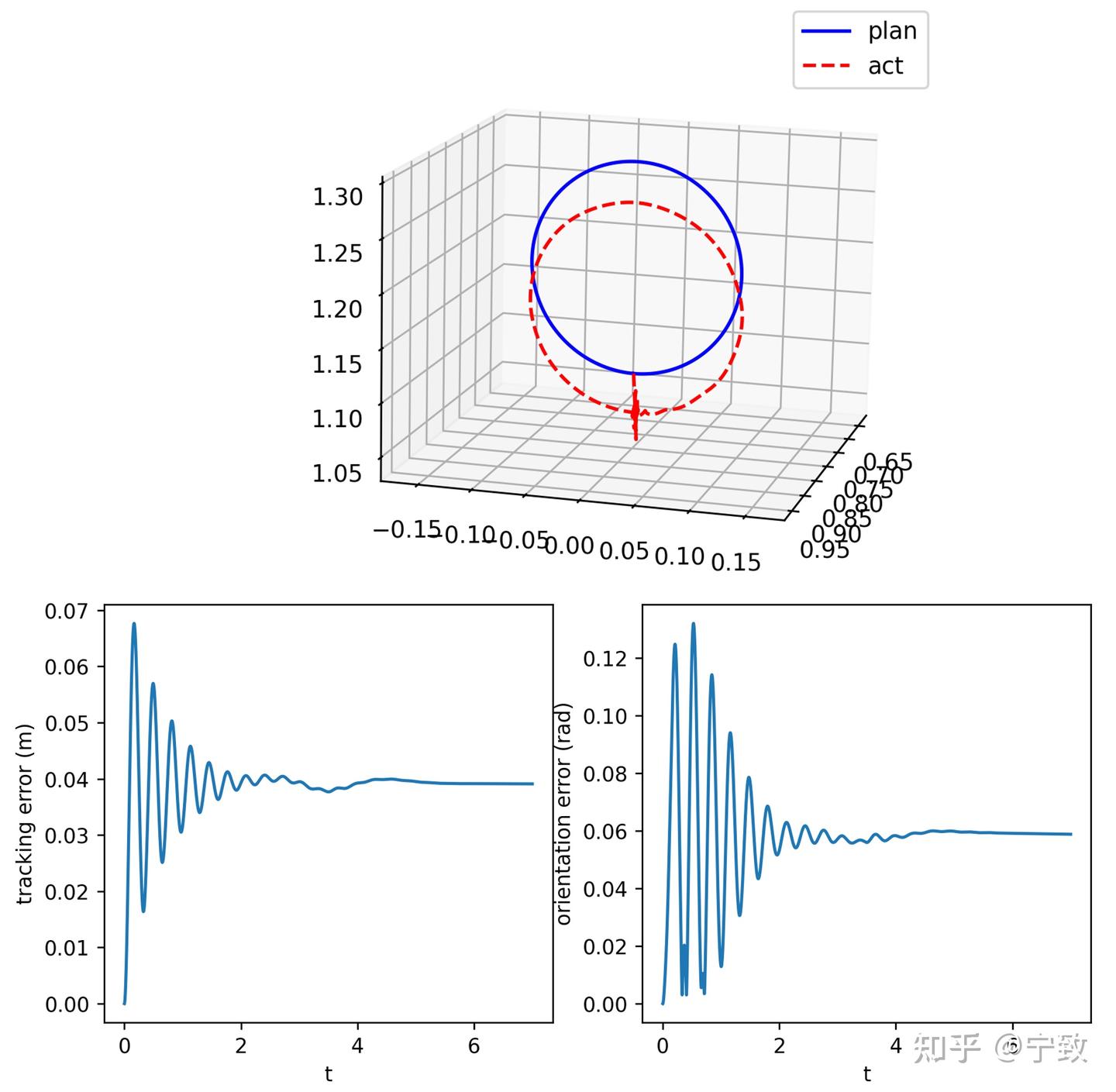
)跟踪效果也和关节pd控制是相似的,但这种方法不仅避免了全轨迹的逆运动学,而且避免了jacobian矩阵求逆。因此计算复杂度显著提升。
虽然进一步优化PD参数可以提升效果。上面两种方法和关节PD控制一样,不是精确的控制方法,难以保证不同位姿下的效果。
3.3 笛卡尔空间的解耦控制方法
这一方法本质上是笛卡尔空间直接控制+动力学前馈的方法,即
�=��{��+��[��−��(�)]+��[�˙�−��˙]}
其中,
��=�−���
关节空间的前馈扭矩,需要从末端笛卡尔空间量求逆运动学获得,比较复杂,因此,可以通过雅可比进行简化:
首先,
��=�(�)�¨+�(�,�˙)+�(�)+�(�,�˙)
��=��(�)�¨�+��(�,�˙)+��(�)+��(�,�˙)
有
��=�−�[�(�)�¨+�(�,�˙)+�(�)+�(�,�˙)]
由于 �˙=��˙,�¨=�˙�˙+��¨
�¨=�−1(�¨−�˙�˙)
有
��=�−��(�)�−1�¨−�−��(�)�−1�˙�˙+�−�[�(�,�˙)+�(�)+�(�,�˙)]
因此, ��(�)=�−��(�)�−1,��(�,�˙)=�−�[�(�,�˙)−�(�)�−1�˙�˙],��(�)=�−��(�),��(�,�˙)=�−��(�,�˙),
然而,上面的推导仍不能解决问题。要计算前馈力,仍然需要期望关节位置和速度(需要逆运动学)。
虽然可以用当前的实际状态获取,但那就不需要前面的推导,直接利用关节空间逆动力学来计算关节扭矩即可。这个方法本质上相当于一种0力控制,或许可行。因此,我假设
�=��{��[��−��(�)]+��[�˙�−��˙]}+��
测试这个方法是否可行,我假设只考虑重力补偿,用当前实际关节角计算重力补偿作为tau_d。
实现很简单,在前面的RobotJacTController控制器类的update函数最后,增加
tau_ref = self.robot_model.gravity_torque(q)
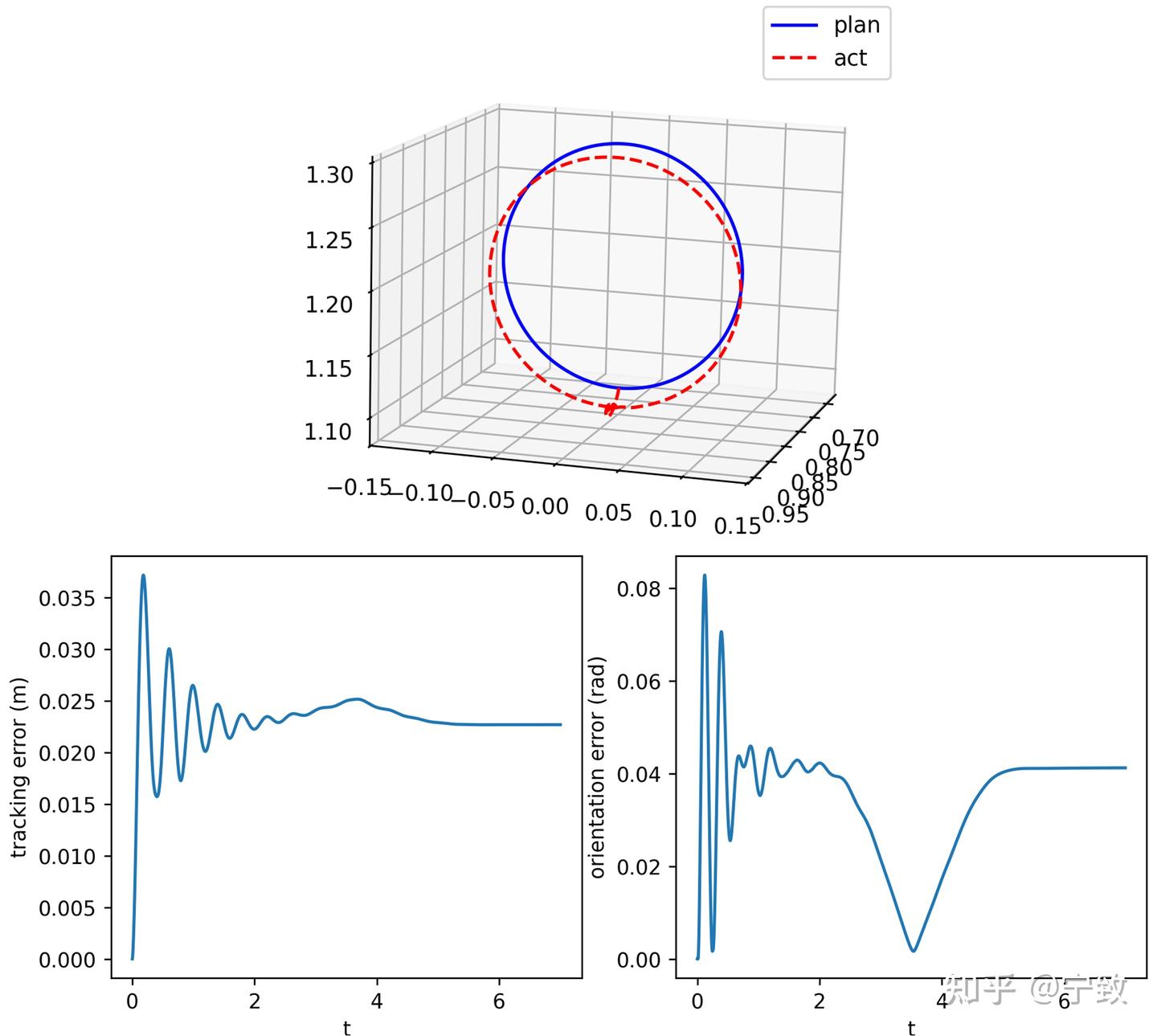
tau += tau_ref即可实现:
可以看出,跟踪效果显著增强,仔细观察可以看到微小的跟踪误差。和关节空间控制+重力补偿的效果接近。表明重力补偿采用实际关节状态也是可行的。这实际上应该称作零重力控制+笛卡尔空间直接控制方法。然而,如果是基于当前关节空间状态的动力学前馈,控制系统就不稳定了。
事实上,书中提供的动力学前馈方法是:
�=���
其中, �=��(�){�¨�+��[��−��(�)]+��(�˙�−��˙)}+��(�,�˙)+��(�)+��(�,�˙)
所有的关节状态都采用实际状态计算。结合上面的推导,可以简化为 �=�(�)�−1{�¨�+��[��−��(�)]+��(�˙�−��˙)}−�(�)�−1�˙�˙+�(�,�˙)+�(�)+�(�,�˙)
需要计算M矩阵,在RobotModel类中添加功能:
def inertia_matrix(self, q):
self.data.qpos = q.copy()
mujoco.mj_step(self.model, self.data)
M_matrix = np.zeros((self.dof, self.dof))
mujoco.mj_fullM(self.model, M_matrix, self.data.qM)
return M_matrix在RobotJacTController类中增加控制器的实现:
def update_with_feedforward(self, q, qd, pos_ref, rotmat_ref, vel_ref, angvel_ref, acc_ref, angacc_ref):
M = self.robot_model.inertia_matrix(q)
jac = self.robot_model.jacobian(q, self.ee_body_name, self.ee_point_on_body)
jac_inv = np.linalg.pinv(jac)
jac_d = self.robot_model.jacobian_d(
q, qd, self.ee_body_name, self.ee_point_on_body
)
jac_T_inv = np.linalg.pinv(jac.T)
tau_compensation = self.robot_model.inverse_dynamics(
q, qd, np.zeros(self.robot_model.dof)
)
pos, rotmat = self.robot_model.forward_kinematics(
q, self.ee_body_name, self.ee_point_on_body
)
p = pos_ref - pos
R = rotmat.T @ rotmat_ref
w = rotmat @ Rotation.from_matrix(R).as_rotvec()
pos_err = np.hstack((p, w))
ee_vel_ref = np.hstack((vel_ref, angvel_ref))
vel_err = ee_vel_ref - jac @ qd
acc_d = np.hstack((acc_ref, angacc_ref))
xdd_correction = self.kp * pos_err + self.kd * vel_err
tau = (
M @ jac_inv @ (acc_d + xdd_correction)
- M @ jac_inv @ jac_d @ qd
+ tau_compensation
)
return tau在mujoco仿真中修改控制器的调用为
data.ctrl = robot_controller.update_with_feedforward(
data.qpos,
data.qvel,
pos[step],
orientation,
vel[step],
np.zeros(3),
acc[step],
np.zeros(3),
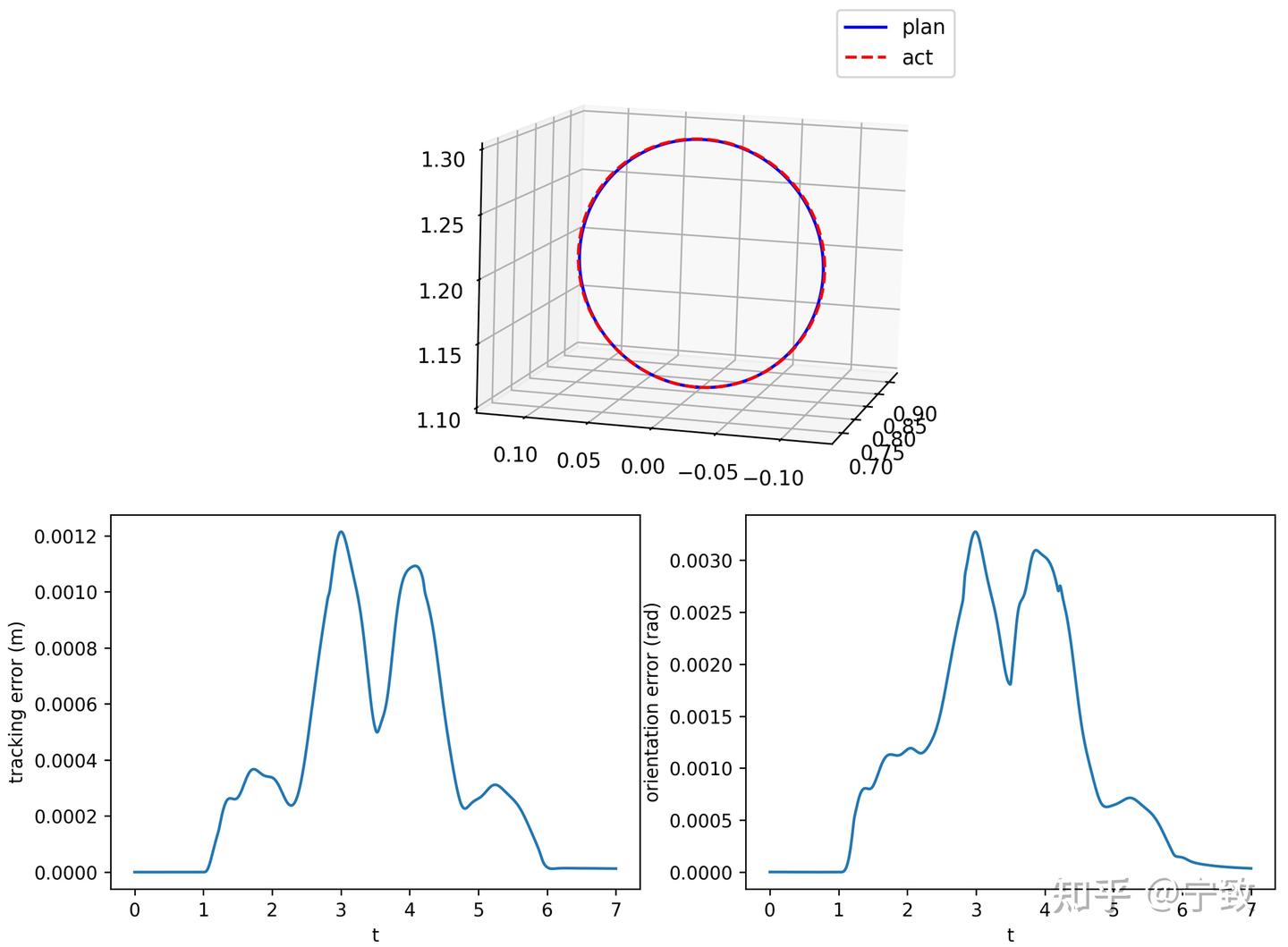
)即可实现:

可以看出,跟踪效果显著增强,跟踪误差极小。
至此,《机器人学导论》中最基础的位置控制方法已经学习完毕。后续继续探讨力控、和其他更高级的位置控制方法。






评论0