
来源:https://zhuanlan.zhihu.com/p/1891229819301253349
1980年代,腹腔镜手术技术兴起,医生通过小切口插入摄像头和手术器械进行微创手术。1990年代,受到军事远程手术的推动,机器人技术与微创手术相结合的想法逐渐形成。1995年,计算机运动公司(Computer Motion)推出了 AESOP 机器人(腹腔镜摄像头机械臂)。1999年,Intuitive Surgical公司推出da Vinci Surgical System(达芬奇手术机器人),成为全球首个商业化的多孔腹腔镜手术机器人。2000年,FDA批准其用于腹腔镜手术,标志着机器人辅助手术进入临床应用阶段。2009年,da Vinci Si发布,增加双操控台,支持多人协作手术。2014年,da Vinci Xi发布,优化机械臂灵活性,提高可操作范围,支持多孔手术的灵活部署。2024年,da Vinci 5获得FDA许可。
2020年以后,在我国前期重大专项支持下的技术积累与突破,以及在高端医疗器械的国产替代政策扶持与资本逐利的背景下,腹腔镜手术机器人的国产替代开始发力,呈现持续增长状态。目前国内做单孔/多孔腹腔镜手术机器人的厂家不下十家,有微创机器人,精锋医疗,术锐机器人,思哲睿康多,瑞龙外科,威高妙手,佗道,康诺思腾,敏捷医疗,唯精,华匠等。目前看,有些已经掉队,很可能逐渐湮没或者转其它类型的手术机器人。

由于达芬奇依然是这个领域的王者,而且公开资料与研究论文都比较多,因此这里仅基于公开的达芬奇相关的资料以及个人浅显的理解,简单介绍一下腹腔镜手术机器人中的相关技术,给想从事这方面工作的人一点参考。内容分为几块:结构,电子,软件,算法,技术要求。由于个人对不同领域的熟悉程度不同,因此可能详略有别。
1、机械结构
1.1、主操作手
下面是Da Vinci Xi与Da Vinci 5的主操作手,国内的腹腔镜手术机器人基本上都是仿的Da Vinci Xi。Da Vinci 5的主操作手在第4,5连杆抛弃了直角的设计,改为了圆角,看上去更加圆润,但是这样的外观设计对于机械来说应该是不太友好的,尤其是电机选型与布局。而且Da Vinci 5的第三关节也抛弃了四连杆+电机远置的机构,看上去更加简洁了,这样的话第三关节的驱动电机可能就比较大。
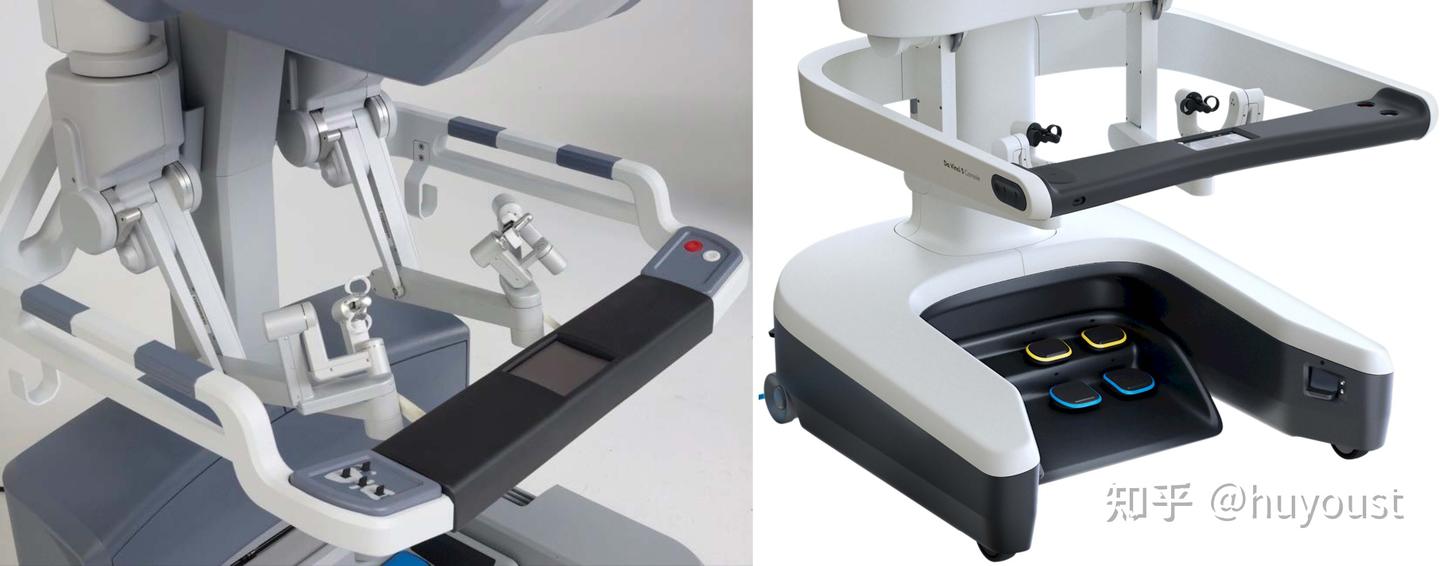
实际上对于主从操作类型的手术机器人来说,主操作手的结构有两种大的思路:一个是以Force Dimension为代表的并联结构,另一个达芬奇这样的串联结构。串联结构主操作手的主要优点是活动空间大,手腕的姿态映射比较直观,灵活性更大。因此腹腔镜手术机器人基本都是串联结构的主手,但是在一些其它的手术机器人中,也会有并联结构的主手。
除了最后一个关节,主手的其它关节都是有电机+编码器的,编码器很好理解,用于测量关节角度,从而根据正运动学计算医生操作手的末端位姿,电机主要用于主动重力平衡。由于结构限制,主手上的电机通常都是用的小减速比小直径的电机,尤其是靠近末端的关节,电机可以输出的力矩也不会很大。为了尽可能降低重力补偿需要输出的关节反驱力矩,主手的关节通常会安装辅助弹簧。通常主手会设计一个自动平衡的位置作为零位位置,当然这个平衡位置是一种不稳定平衡。在这个位置关节电机不需要输出反驱力就可以让主手保持平衡,这个平衡不是靠关节电机的自锁实现的,而是通过结构上仔细调整关节弹簧的输出力实现的。
1.2、器械操作臂
由于多孔腹腔镜手术机器人是用穿刺器在肚皮上打孔,然后将手术器械伸进腹腔内操作,器械在腹腔内是需要执行六自由度运动的,但是无论器械怎么动,它都必须有一个不动点,那就是肚皮上打的孔。这就所谓的远心不动点(RCM)结构设计。目前腹腔镜的器械操作臂,圆心不动点结构都跟da Vinci Xi的结构差不多,都是虚拟四连杆结构,如下所示:
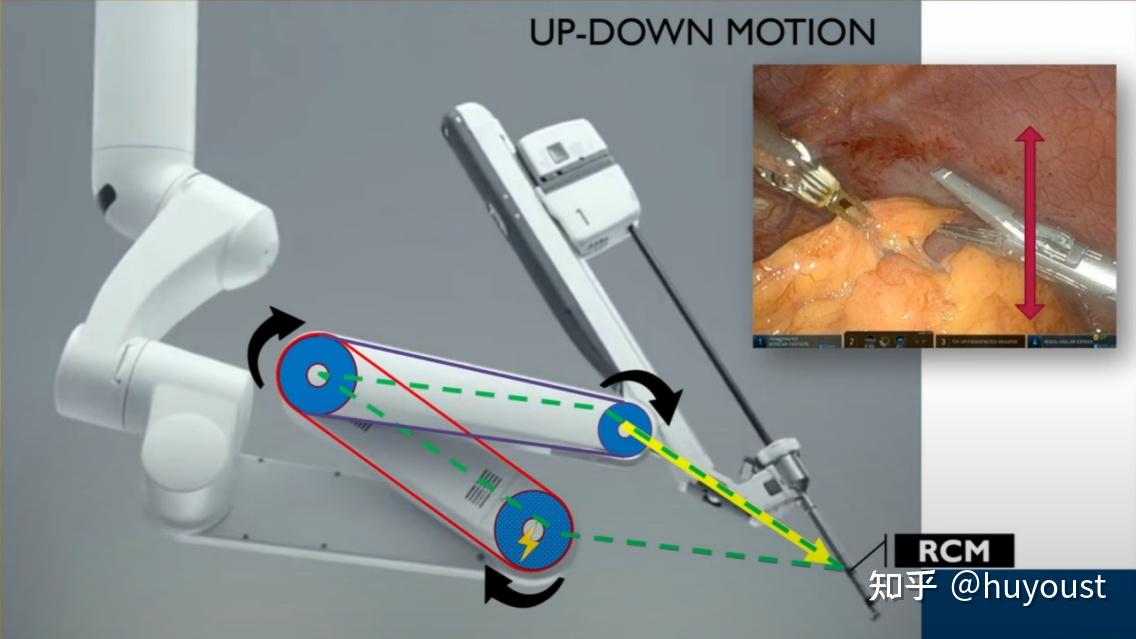
显然远心不动点的精度很重要,如果远心不动点的精度很差,那么手术时肚皮上打孔的位置可能就会受到横向的撕扯,从而造成额外的伤害。而且在运动学建模时,通常将RCM设为虚拟关节以简化运动学模型的运算,RCM的位置误差会进一步传导到后续的关节,这样又会进一步影响末端位置的计算精度以及主从控制的精度(器械操作臂的运动学建模与误差补偿在腔镜手术机器人中非常重要),因此远心不动点的精度是多孔腹腔镜手术机器人的核心技术指标之一。
远心不动点的位置是靠虚拟四连杆机构的前三个联动关节的运动与结构精度保证的。其中只有第一个关节是主动关节,其余两个关节是联动的。由于这三个关节相距较远,关节之间的传动结构基本都是皮带轮类似的结构,而不宜用齿轮。受限于结构尺寸以及控制精度要求,普通的皮带轮的运动精度与整体刚度无法满足要求,无论是工业上常用的同步带,V带,还是钢丝绳,都无法提供足够的刚度(刚度大,位置控制才能既快又准)。现在常用的都是用一层层堆叠(内外层长度不一样)的钢带代替皮带,从而保证四连杆结构的刚度以及控制精度。由于结构设计、制造加工等误差的存在,目前远心不动点的精度很难做到特别高,都是mm级别的误差。
1.3、耗材
耗材的主体结构都类似,基本都是远心传动,活动关节集中末端,驱动电机/轮与末端关节之间是细长的套杆,这样的结构特点决定了耗材中的传动也只能用绳传动。
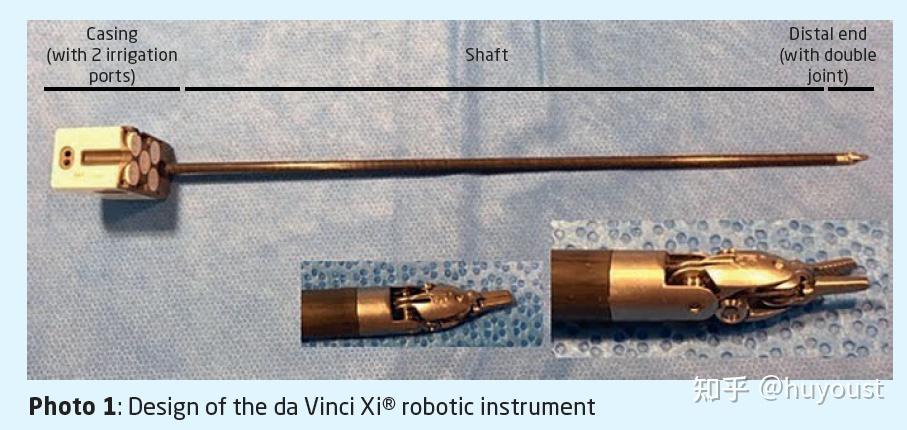
由于控制精度的要求,耗材中的传动绳要求很高,既要求足够软(最小弯曲半径足够小),也要求受力后的弹性形变足够小(弹性模量够大)。能同时直接满足这两个要求是很难的,对材料的要求很高。可能是出于材料技术与成本的考虑,达芬奇手术器械中,并不是用的一整根的钢丝绳,中间黑色的套管内其实是小钢管(钢管没有多股编织,不存在编织间隙,刚度比钢丝绳好很多),钢管两头与钢丝绳固定,这样组合实现既“软”又“硬”的效果。当然,耗材的结构设计还有很多其它的考量与细节,从机械的角度看,肯定是一件艺术品。






评论0